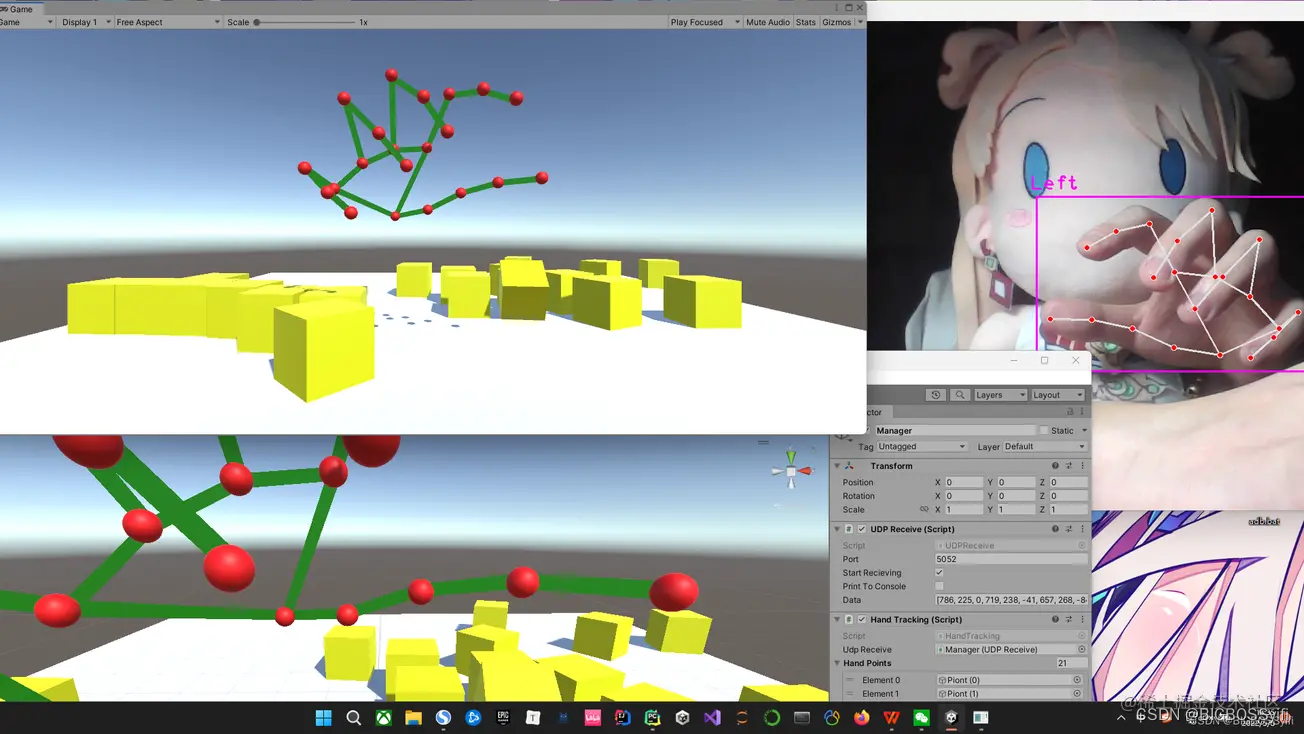
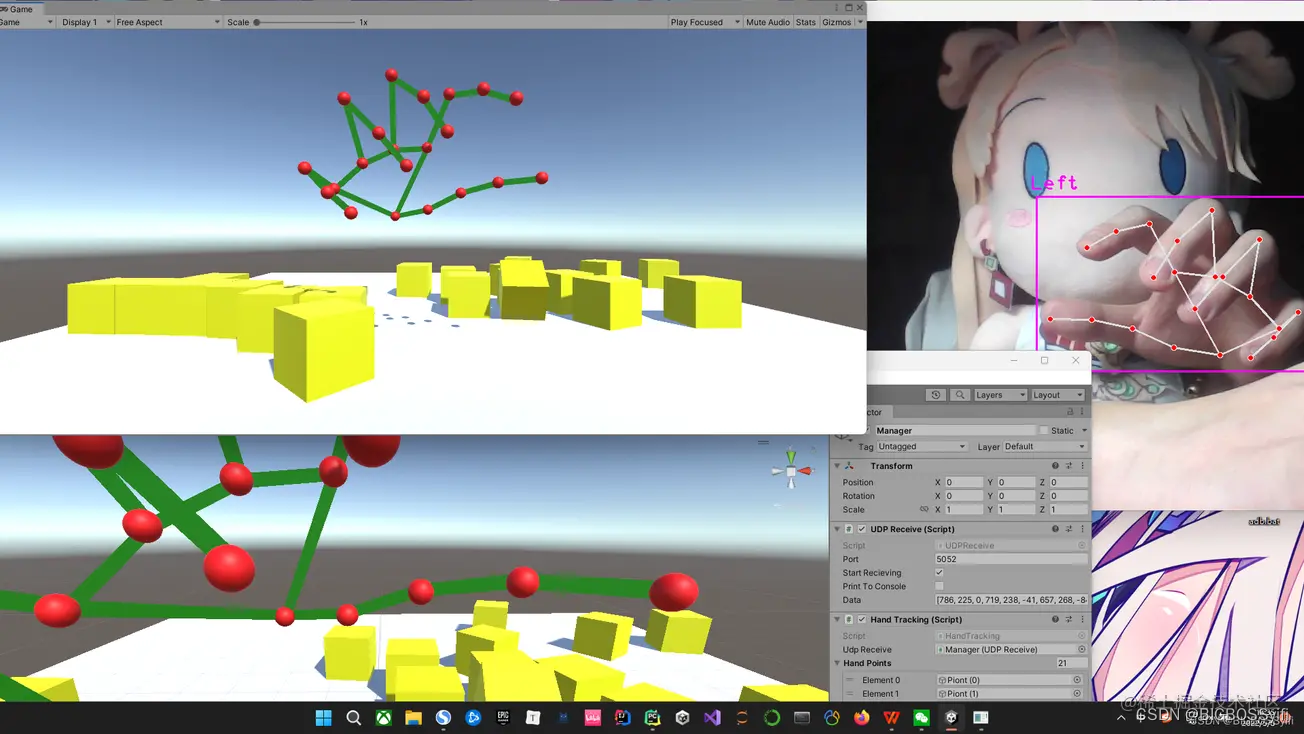
This article will introduce how to use Python with OpenCV image capture, with powerful Mediapipe library to achieve ** gesture detection ** and recognition; The recognition results are synchronized to Unity** * in real time to realize the recognition of the gesture model's moving body structure in Unity
Demo展示:https://hackathon2022.juejin.cn/#/works/detail?unique=WJoYomLPg0JOYs8GazDVrw
CSDN: https://blog.csdn.net/weixin_50679163?type=edu
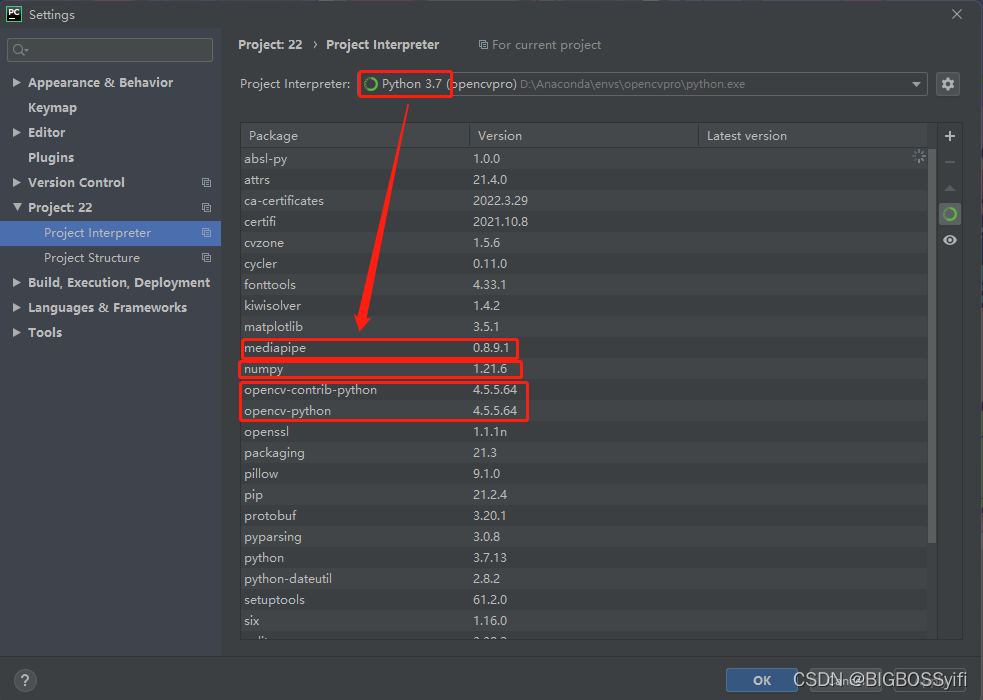
Python Install Mediapipe
pip install mediapipe==0.8.9.1Or Use setup.py to install https://github.com/google/mediapipe
Python 3.7
Mediapipe 0.8.9.1
Numpy 1.21.6
OpenCV-Python 4.5.5.64
OpenCV-contrib-Python 4.5.5.64
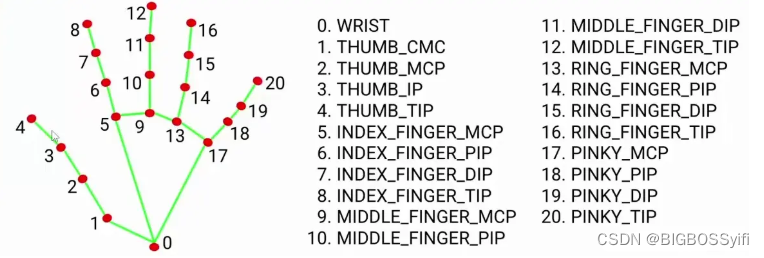
Gesture feature point diagram
The core of this project to achieve real-time motion capture in Unity ** is to communicate with socket via local UDP
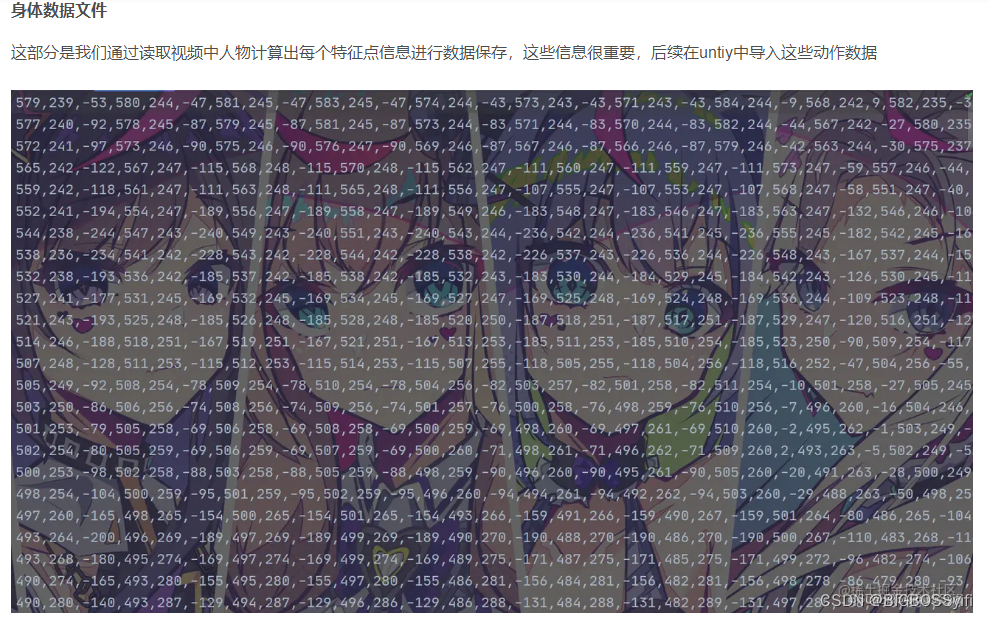
For the data file section, Can view the detail [OpenCV + Mediapipe character combination of motion capture and Unity engine] (https://blog.csdn.net/weixin_50679163/article/details/124658313) to the data file is part of the interpretation and use
Camera Capture:
import cv2
cap = cv2.VideoCapture(0) #OpenCV摄像头调用:0=内置摄像头(笔记本) 1=USB摄像头-1 2=USB摄像头-2
while True:
success, img = cap.read()
imgRGB = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) #cv2图像初始化
cv2.imshow("HandsImage", img) #CV2窗体
cv2.waitKey(1) #关闭窗体FPS
import time
#帧率时间计算
pTime = 0
cTime = 0
while True
cTime = time.time()
fps = 1 / (cTime - pTime)
pTime = cTime
cv2.putText(img, str(int(fps)), (10, 70), cv2.FONT_HERSHEY_PLAIN, 3,
(255, 0, 255), 3) #FPS的字号,颜色等设置Socket: Define Localhost和post
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
serverAddressPort = ("127.0.0.1", 5052) # 定义IP和端口
# 发送数据
sock.sendto(str.encode(str(data)), serverAddressPort)Gesture motion capture:
if hands:
# Hand 1
hand = hands[0]
lmList = hand["lmList"]
for lm in lmList:
data.extend([lm[0], h - lm[1], lm[2]])from cvzone.HandTrackingModule import HandDetector
import cv2
import socket
cap = cv2.VideoCapture(0)
cap.set(3, 1280)
cap.set(4, 720)
success, img = cap.read()
h, w, _ = img.shape
detector = HandDetector(detectionCon=0.8, maxHands=2)
sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
serverAddressPort = ("127.0.0.1", 5052)
while True:
success, img = cap.read()
hands, img = detector.findHands(img)
data = []
if hands:
# Hand 1
hand = hands[0]
lmList = hand["lmList"]
for lm in lmList:
data.extend([lm[0], h - lm[1], lm[2]])
sock.sendto(str.encode(str(data)), serverAddressPort)
cv2.imshow("Image", img)
cv2.waitKey(1)
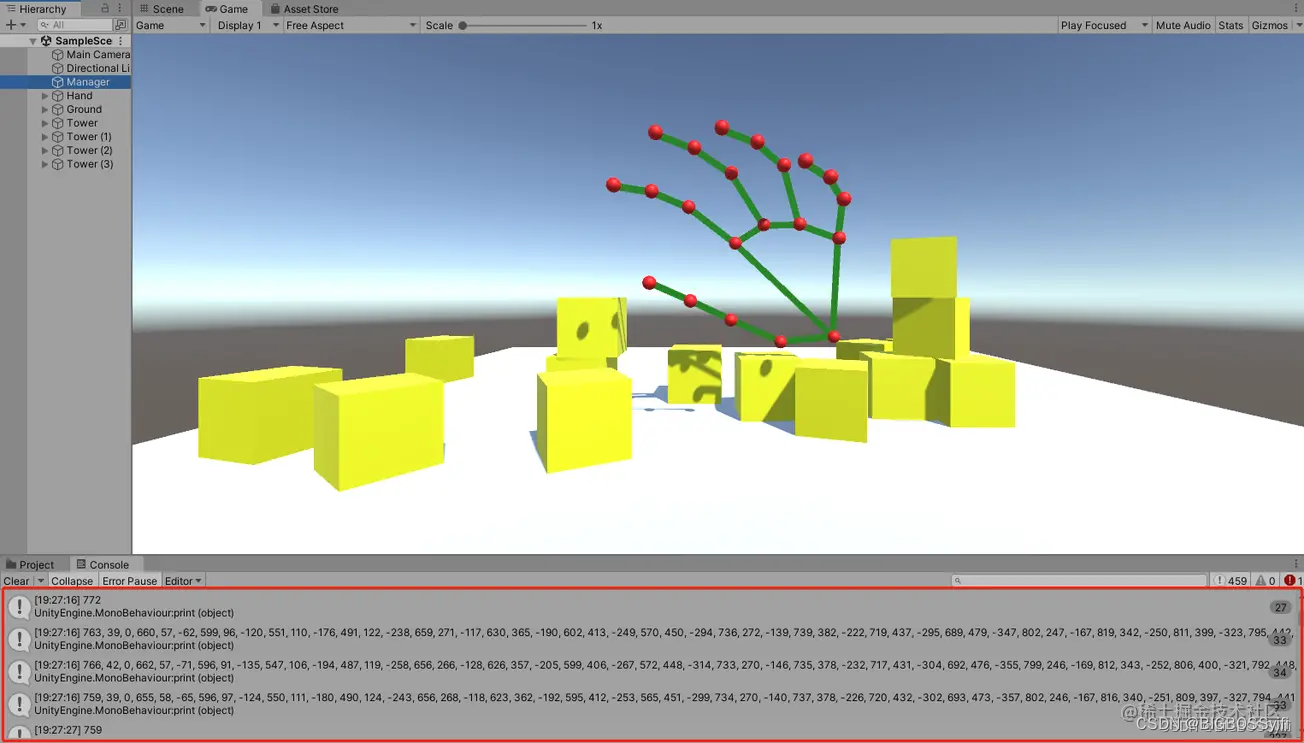
In Unity, we need to build a model of the character, here we need a 21 Sphere as the feature point of the ** gesture and 21 Cube as the stand ** in the middle of the ** gesture
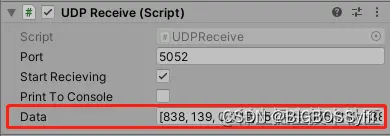
The function of this code ** will receive the data sent by the Socket **
using UnityEngine;
using System;
using System.Text;
using System.Net;
using System.Net.Sockets;
using System.Threading;
public class UDPReceive : MonoBehaviour
{
Thread receiveThread;
UdpClient client;
public int port = 5052;
public bool startRecieving = true;
public bool printToConsole = false;
public string data;
public void Start()
{
receiveThread = new Thread(
new ThreadStart(ReceiveData));
receiveThread.IsBackground = true;
receiveThread.Start();
}
private void ReceiveData()
{
client = new UdpClient(port);
while (startRecieving)
{
try
{
IPEndPoint anyIP = new IPEndPoint(IPAddress.Any, 0);
byte[] dataByte = client.Receive(ref anyIP);
data = Encoding.UTF8.GetString(dataByte);
if (printToConsole) { print(data); }
}
catch (Exception err)
{
print(err.ToString());
}
}
}
}NoData:

Here is the cs file corresponding to each Line to achieve the functions: ** Connect the feature points and the Line together **
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class LineCode : MonoBehaviour
{
LineRenderer lineRenderer;
public Transform origin;
public Transform destination;
void Start()
{
lineRenderer = GetComponent<LineRenderer>();
lineRenderer.startWidth = 0.1f;
lineRenderer.endWidth = 0.1f;
}
// 连接两个点
void Update()
{
lineRenderer.SetPosition(0, origin.position);
lineRenderer.SetPosition(1, destination.position);
}
}Here is ** read the gesture data identified above and saved **, ** and loop each sub-data to each Sphere point **, so that the feature point moves with the capture of ** camera **
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class HandTracking : MonoBehaviour
{
public UDPReceive udpReceive;
public GameObject[] handPoints;
void Start()
{
}
void Update()
{
string data = udpReceive.data;
data = data.Remove(0, 1);
data = data.Remove(data.Length - 1, 1);
print(data);
string[] points = data.Split(',');
print(points[0]);
for (int i = 0; i < 21; i++)
{
float x = 7-float.Parse(points[i * 3]) / 100;
float y = float.Parse(points[i * 3 + 1]) / 100;
float z = float.Parse(points[i * 3 + 2]) / 100;
handPoints[i].transform.localPosition = new Vector3(x, y, z);
}
}
}
Good Luck,Have Fun and Happy Coding!!!