Crawler is a HyperNEAT implementation used to train controllers of legged robots simulated in 2D. It started as a school leaving examination IT project and will hopefully receive some improvements in the future. The full documentation/paper can be found here (Czech).
A pre-built package with trained controllers can be found in the releases here.
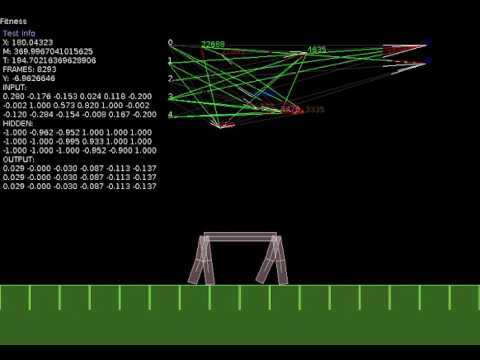
The best and some of the more interesting results can be seen on my Youtube channel:
The project can be built using the IntelliJ IDEA IDE, a Maven build coming soon (probably). The only requirement is a JDK with JavaFX support (OpenJDK will not work).
The project consists of 2 jars:
main - the HyperNEAT training algorithm
gui - a results viewer
It is recommended to run them both in the same folder, as they use the same results folder.
JBox2D - used for simulation and vizualization
A Hypercube-Based Encoding for Evolving Large-Scale Neural Networks, Stanley et al., 2009
Evolving Coordinated Quadruped Gaits with the HyperNEAT Generative Encoding, Clune et al., 2009
Evolving Neural Networks through Augmenting Topologies, Stanley et al., 2002