Multi-Agent Multi-Scale A* is a shortest path planning algorithm for multi agents in multi scale graphs.
$ cd catkin_ws/src
$ catkin_init_workspace
$ git clone https://github.gatech.edu/DCSL/mams_astar.git
$ catkin build mams_astar- Open agent_node.cpp located in /src/nodes. In main, configure tree, initial and goal states, number of agents, location of sensors for graph construction. Save the change.
- Compile again with catkin build mams_astar
$ cd catkin_ws/src
$ catkin build mams_astar- Running
$ roscore
$ rosrun mams_astar multiscale- Observe result: Open data_observer.m in /data Change the number of agents accordingly and Run
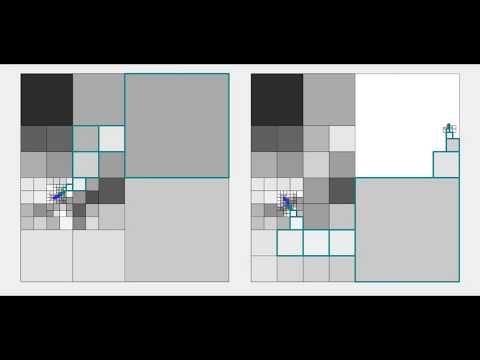
- In main of agent_node.cpp, each agent is assigned with the same tree, but different sensor locations will be used to construct different graphs for each agent in PrepareAgent()
- Each agent constructs a reduced graph using ConstructReducedGraph() : the construction rule is based on top-down recursive investigation of every node in the given tree. Each agent chooses specific nodes from the common tree using ChooseNodes4Vertices(): finer near the sensor and coarser farther away.
- n_Search() does 1) process message, 2) expand the highest index vertex in que, 3) publish the expanded vertex via ROS messaging
- Algorithm terminates when the finest goal vertex is processed by all agents
- State: Actual coordinates of the world, this will be normalized to positive integers depending on the depth of tree and boundary of the world.
- Key: Key is an array of size DIM (dimension of search problem) of positive integers that assigns a unique ID to each node of tree. Each integer represents the spatial coordinate in each axis of the center of the hypercube. Key will be used to check the neighbor & nest relationship of two vertices.
- Tree: Tree object will be created in main() by passing the name of the file that stores preprocessed wavelet coefficients of 2D map. See "data/cost_map/map_wavelet.txt". The tree object will be assigned to all agents for their graph construction.
- Each agent stores a Graph instance that manages the vertices & edges.
- Each agent alongside this Graph instance, stores following lists to carry vertices information:
- a. vec< pair<Key, int> > vec_chosen_nodes_ : the location and size of the vertex. size=-1 for removed vertex
- b. vec< double > vec_node_value_: the information (risk, cost) contained in the vertex The index of these vecs corresponds to the vertex ID stored in Graph instance.
- cost to come: map<BaseVertex*, double> m_mpStartDistanceIndex
- predecessor vertex: map<BaseVertex*, BaseVertex*> m_mpPredecessorVertex; //pointer to pointer
- closed list: set m_stDeterminedVertices; //closed vertices ID
- open list: multiset<BaseVertex*, WeightLess > m_quCandidateVertices;