Arduino TWAI (Two-Wire Automotive Interface - concept conceived by Espressif, implements the CAN Bus) library for Xiaomi CyberGear.
Include the Xiaomi CyberGear driver and declare the XiaomiCyberGearDriver object:
#include "xiaomi_cybergear_driver.h"
uint8_t CYBERGEAR_CAN_ID = 0x7F; // CAN ID of the CyberGear motor
uint8_t MASTER_CAN_ID = 0x00; // Arduino CAN ID
XiaomiCyberGearDriver cybergear = XiaomiCyberGearDriver(CYBERGEAR_CAN_ID, MASTER_CAN_ID);In setup() call the .init_twai() function to configure the TWAI interface.
serial_debug flag passed with true value will setup Serial interface for logging.
Then use cybergear's methods to configure the motor with desired mode and parameters.
#define RX_PIN D7
#define TX_PIN D6
void setup(){
cybergear.init_twai(RX_PIN, TX_PIN, /*serial_debug=*/true);
cybergear.init_motor(MODE_POSITION);
cybergear.set_limit_speed(10.0f); /* set the maximum speed of the motor */
cybergear.set_limit_current(5.0); /* current limit allows faster operation */
cybergear.enable_motor(); /* turn on the motor */
cybergear.set_position_ref(0.0); /* set initial rotor position */
...
}To get the CyberGear status call cybergear.request_status() which will trigger the motor to respond with its status.
void loop(){
...
// send a request to the cybergear to receive motor status (position, speed, torque, temperature)
unsigned long currentMillis = millis();
if (currentMillis - previousMillis >= TRANSMIT_RATE_MS) {
previousMillis = currentMillis;
cybergear.request_status();
}
}The response message needs to be processed (cybergear.process_message()) in handle_rx_message() function:
static void handle_rx_message(twai_message_t& message) {
if (((message.identifier & 0xFF00) >> 8) == CYBERGEAR_CAN_ID){
cybergear.process_message(message);
}
}After processing the motor message its status can be requested using:
void loop(){
...
XiaomiCyberGearStatus cybergear_status = cybergear.get_status();
Serial.printf("POS:%f V:%f T:%f temp:%d\n", cybergear_status.position, cybergear_status.speed, cybergear_status.torque, cybergear_status.temperature);
...
}See the Xiaomi_CyberGear_Arduino/xiaomi_cybergear/xiaomi_cybergear.ino for full example.
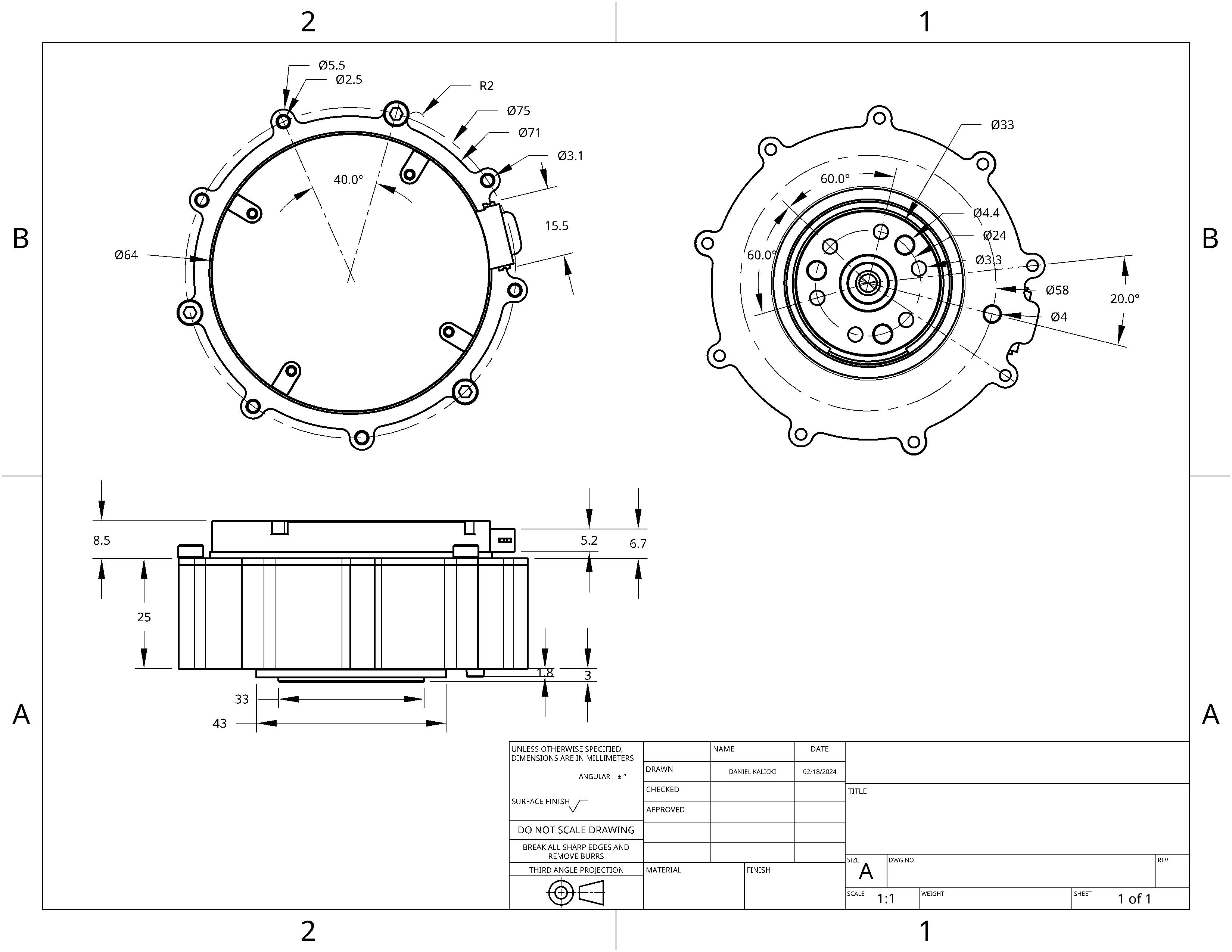
Xiaomi CyberGear technical drawing:
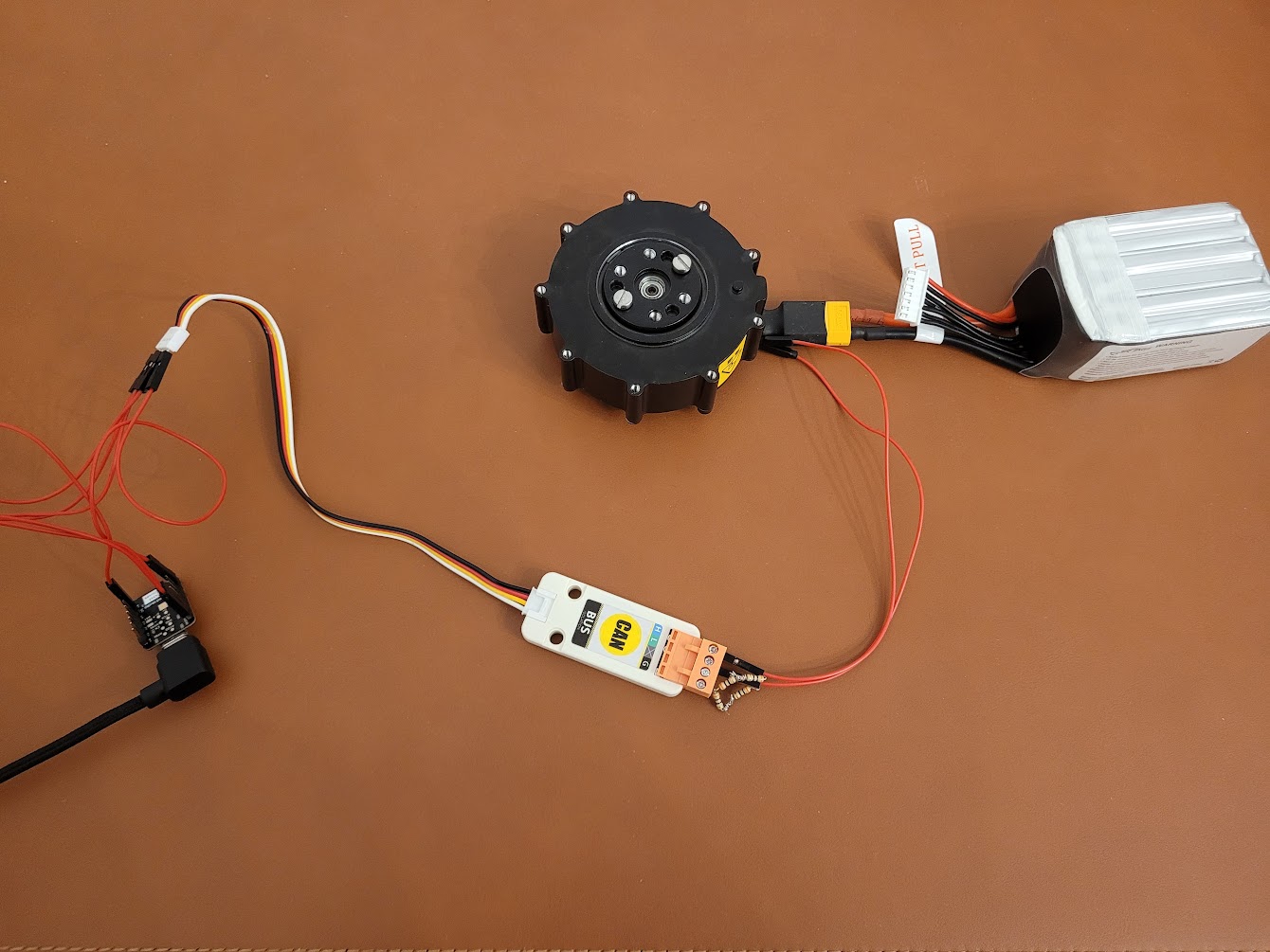
Test were perform using Seeed Studio XIAO ESP32S3 development board, CANBus Unit(CA-IS3050G) was used as CANBus transceiver to connect with Xiaomi CyberGear. (Li-Poly) Tattu 22.2 V 1550mAh battery was used as a power supply for the motor.