DISCLAIMER: This README is directed at future Computer Science students at Utah State University that may want to continue this project.
Smart HVAC systems are increasing in importance as the climate changes. In the next 30 years, the demand for air conditioning is expected to increase three-fold as the Earth warms and warm countries develop. This project uses reinforcement learning to optimize a smart thermostat.
This project was run using Python 3.6.8 for compatibility with Keras, Tensorflow, etc...
I froze all the packages I was using with their versions in requirements.txt. These can be installed with pip install -r requirements.txt.
To install the custom environment, go to the gym-hvac folder and type pip install -e .
The main script is hvac_learner.py which runs the learning loop indefinitely and logs its results to hvac_learner/output/results.csv.
This project uses a custom OpenGym environment to simulate heating and cooling in a home. The custom gym environment is located in gym-hvac/gym_hvac/envs/hvac_env.py/
These are observations the learner receives from the environment. In a realistic scenario, only the room/rooms with thermostats would be observable.
| Num | Observation | Min | Max |
|---|---|---|---|
| 0 | Temperature Air | -273 | Inf |
| 1 | Temperature Ground | -273 | Inf |
| 2 | Temperature HVAC | -273 | Inf |
| 3 | Temperature Basement | 0 | 40 |
| 4 | Temperature Main Floor | 0 | 40 |
| 5 | Temperature Attic | 0 | 40 |
These are the possible actions the learner can take to modify the environment. In a realistic scenario it wouldn't make sense to turn on the heater when it's warmer than room temperature outside and vice versa.
| Num | Action |
|---|---|
| 0 | Turn the cooler on |
| 1 | No action or turn off heater/cooler |
| 2 | Turn the heater on |
The initialization function sets up the static environment. This includes the rooms which are modeled as a set of boundaries (walls) and optionally an HVAC unit. Currently the main floor is the only floor with an HVAC unit. The init function also sets up the weather generator object (which isn't actually a Python generator). The weather generator keeps track of weather patterns found in gym-hvac/gym_hvac/envs/resources/weather.csv. This weather data is hourly weather data near Utah State University from 2013-2019.
The reset function resets the state of the environment. It also generates a new state from the weather data.
The step function updates internal temperatures, determines if termination conditions have been met (too hot, too cold, or too many steps), and calculates the reward.
The reward function consists of two parts: the temperature reward and the action cost. These two parts are summed together using a weighted function.
The temperature reward function is modeled using this image:
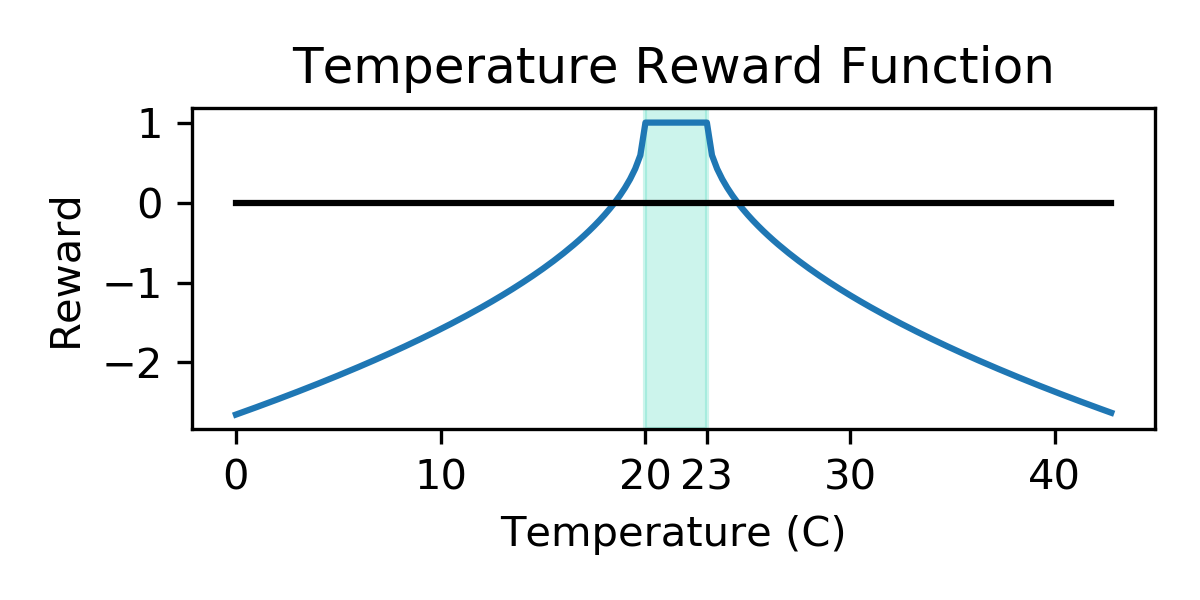
This function was designed to model comfortable temperatures.
The action cost is simply -1 if action is taken, 0 if no action is taken. This is to simulate the cost of turning on an HVAC unit in real life.
The learner is found in hvac_learner/hvac_learner.py. The code for the learner largely came from this article:
Cartpole - Introduction to Reinforcement Learning
The learner logs its state to a CSV file every step. This in turn may be rendered to a plot.
I lowered the rate of exploration decay x100 to make the program more reliable. While it often finds the (near) global minimum before reaching the lower limit, it was unreliable.
I created a test script gym_hvac_tester/tester.py to help fine tune the parameters of the model. It non-intelligently steps the model forward while following a sequence of actions specified using command line parameters. The action sequence is encoded using run-length encoding.
The plotters were created to create plots for the final presentation. They use pandas, seaborn, and Matplotlib to to plot temperature trends, as well as other trends.
I used FFMPEG to convert the sequence of graphs into an animation.
ffmpeg -r 4 -f image2 -s 1920x1080 -i %03d.png -vcodec libx264 -crf 25 -pix_fmt yuv420p output.mp4
ffmpeg -i input.mp4 -vf "drawtext=fontfile=Arial.ttf: text='%{frame_num}': start_number=1: x=20: y=20: fontcolor=black : fontsize=20: box=1: boxcolor=white: boxborderw=5" -c:a copy output.mp4