
You can also find all 50 answers here 👉 Devinterview.io - Gradient Descent
Gradient descent is a fundamental optimization technique within machine learning and other fields. It was introduced by the physicist Peter Molnar in 1964 and later independently rediscovered by other researchers.
The basic idea of gradient descent is to iteratively update model parameters in the direction that minimizes a performance metric, often represented by a cost function or loss function.
Mathematically, this process is characterized by the gradient of the cost function, computed using backpropagation in the case of neural networks.
Let
The update rule for each parameter can be expressed as:
Here,
One can visualize gradient descent as a person trying to find the bottom of a valley (the cost function).
The individual takes small steps downhill (representing parameter updates), guided by the slope (the gradient) and the step size
-
Batch Gradient Descent: Computes the gradient for the entire dataset and takes a step. This can be slow for large datasets due to its high computational cost.
-
Stochastic Gradient Descent (SGD): Computes the gradient for each data point and takes a step. It's faster but more noisy.
-
Mini-batch Gradient Descent: Computes the gradient for small batches of data, offering a compromise between batch and stochastic methods.
Selecting an appropriate learning rate is crucial.
- If it's too large, overshoot may occur, and the algorithm could fail to converge.
- If it's too small, the algorithm might be slow or get trapped in local minima.
Stopping criteria, such as a predefined number of iterations or a threshold for the change in the cost function, are employed to determine when the algorithm has converged.
While gradient descent provides no guarantee of finding the global minimum, in practice, it often suffices to reach a local minimum.
Here is the Python code:
def batch_gradient_descent(X, y, theta, alpha, iterations):
m = len(y) # Number of training examples
for _ in range(iterations):
error = X.dot(theta) - y # Compute the error
gradient = X.T.dot(error) / m # Compute the gradient
theta -= alpha * gradient # Update parameters
return theta- Momentum: Incorporates the running average of past gradients to accelerate convergence in the relevant directions.
- Adaptive Learning Rates: Algorithms like AdaGrad, RMSProp, and Adam adjust learning rates adaptively for each parameter.
- Beyond the Gradient: Evolutionary algorithms, variational methods, and black-box optimization techniques are avenues for optimization beyond the gradient.
Gradient Descent comes in several variants, each with its unique way of updating model parameters.
- Update method: Utilizes a single random training example for updating parameters.
- Benefits: Faster computations; useful when data is abundant and diverse.
def sgd_step(learning_rate, model, data):
random_example = random.choice(data)
gradient = compute_gradient(model, random_example)
model.parameters -= learning_rate * gradient- Update method: Strikes a balance between full-batch and stochastic, using a small, fixed number of examples for each parameter update.
- Benefits: Computationally efficient and statistically more stable than SGD.
def mini_batch_step(learning_rate, model, data, batch_size):
batch = random.sample(data, batch_size)
gradient = average([compute_gradient(model, example) for example in batch])
model.parameters -= learning_rate * gradient- Update method: Uses a rolling average of gradients to update parameters, which can accelerate convergence and overcome local minima.
- Benefits: Effective in speeding up training on noisy or high-dimensional data.
def momentum_step(learning_rate, model, data, gamma, prev_velocity):
gradient = compute_gradient(model, data)
velocity = gamma * prev_velocity + learning_rate * gradient
model.parameters -= velocity
return velocity- Update method: Adapts learning rates by dividing the gradient by a running average of its recent magnitudes.
- Benefits: Tends to converge more quickly than GD and can be less sensitive to learning rate hyperparameters.
def rmsprop_step(learning_rate, model, data, epsilon, running_avg, gradient_sq):
gradient = compute_gradient(model, data)
running_avg = running_avg * 0.9 + (1 - 0.9) * gradient
model.parameters -= learning_rate * gradient / np.sqrt(running_avg + epsilon)
return running_avg- Update method: Combines momentum and RMSprop, using first and second moment estimations of gradients to adapt learning rates.
- Benefits: Often performs well across different types of datasets.
def adam_step(t, learning_rate, model, data, beta1, beta2, m, v):
gradient = compute_gradient(model, data)
m = beta1 * m + (1 - beta1) * gradient
v = beta2 * v + (1 - beta2) * gradient ** 2
m_hat = m / (1 - beta1 ** t)
v_hat = v / (1 - beta2 ** t)
model.parameters -= learning_rate * m_hat / (np.sqrt(v_hat) + 1e-8)
return m, vLearning rate plays a pivotal role in controlling the rate and accuracy of optimization during gradient descent. Essentially, it determines the step size for each iteration, allowing the algorithm to reach the minima more efficiently.
-
A moderate learning rate ensures gradient descent convergence to the nearest local optima or global optima.
-
If the learning rate is too small, the algorithm might need an excessive number of iterations to converge. Conversely, an excessively high learning rate might cause the algorithm to overshoot or oscillate around the minima, leading to non-convergence.
-
A larger learning rate results in a faster reach to the minima, but this might cause the optimization process to be less accurate.
-
A smaller learning rate can yield higher accuracy, but it might necessitate a longer computation time.
-
Adaptive learning rates, such as those used in stochastic gradient descent or variants like Adagrad, RMSprop, and Adam, adapt the learning rate during training.
-
Mini-batch gradient descent, which typically combines a fixed learning rate with stochastic steps, has introduced a more dynamic approach to learning rate determination.
-
Model Complexity: More complex models, or those with a high degree of multicollinearity, might necessitate careful tuning of the learning rate.
-
Data Variability: Datasets with varying scales across features might require learning rate adaptation.
-
Time and Resource Constraints: The choice of learning rate also impacts the computational time required for training. Validating and adjusting the learning rate could consume additional resources.
Emerging techniques, such as hyperparameter tuning and grid search or random search, have simplified the process of learning rate selection. These methods can automatically determine the ideal learning rate or a range of learning rates based on the underlying model, dataset, and optimization task.
Consider the following Python example using the Keras library and its callbacks module:
import tensorflow as tf
from tensorflow.keras.callbacks import ReduceLROnPlateau
# Define the optimizer
optimizer = tf.keras.optimizers.SGD(learning_rate=0.1)
# Define the learning rate reduction callback
lr_reduce = ReduceLROnPlateau(monitor='val_loss', factor=0.5, patience=5, min_lr=0.001)
# Compile the model
model.compile(optimizer=optimizer, loss='mse', metrics=['mae'])
# Train the model using the learning rate reduction callback
model.fit(X_train, y_train, epochs=100, callbacks=[lr_reduce], validation_data=(X_val, y_val))Gradient descent is an iterative optimization algorithm that minimizes a differentiable function. It's especially useful in machine learning for minimizing cost or error functions.
-
Starting Point Selection: The algorithm begins at a chosen point, called the initial guess or starting point.
-
Iteration: At each step
$i$ , gradient descent updates the current point by subtracting a fraction of the negative gradient.
The symbol
-
Convergence: The algorithm stops when certain criteria are met, such as reaching a preset number of steps, the magnitude of the gradient becoming small, or small change in the cost function between iterations.
-
Optimized Point: The final point, if the algorithm converges, is an optimized solution that minimizes the objective function within a particular range.
The method follows the intuition that a point is a potential local minimum if moving in the opposite direction of the gradient reduces the function value.
For a function
where
The same concept extends to functions of multiple variables. The update rule for a point
Here,
Gradient Descent can face several issues when dealing with non-convex functions.
-
Local Minima: Gradient Descent is prone to getting stuck in local minima in non-convex functions.
-
Saddle Points: These points have zero gradients but are not optima. Gradient Descent can linger around saddle points, slowing convergence.
-
Vanishing Gradient: The gradients near the minimum can become extremely small, causing slow learning or stagnation.
-
Chaotic Optimization Paths: Non-convex functions might have regions where the loss landscape is chaotic, leading to erratic optimization paths.
-
Overshooting: Distant jump locations due to large gradients might lead the algorithm away from minima, making it hard to converge.
-
Initial Point Sensitivity: Convergence might depend heavily on the starting point, leading to varied results across different initializations.
-
Plateaus and Flat Regions: Extensive flat regions can decelerate optimization by stalling gradient-descent updates.
-
Cliffs and Ridges: Steep, narrow cliffs or ridges can misguide optimization by pushing the algorithm off-course.
In the context of machine learning, specifically in learning algorithms or neural networks, the main reason we use gradient descent is the process of iteratively reducing losses: it helps to reach the optimal solution without having to compute a precise gradient at each iteration.
The ultimate goal of a learning algorithm is to minimize a chosen loss function, also known as the cost or objective function. This function assesses the performance of the model by comparing its predictions to the actual data.
By reducing the loss function, we enhance the model's capability to make accurate predictions.
In practice, models often have numerous parameters, leading to high-dimensional spaces. Minimizing the loss function poses a formidable challenge in such multi-dimensional domains.
In multi-dimensional settings, calculating the analytical form of the minima is often unfeasible since it requires solving partial differential equations for high-dimensional spaces. This complexity makes direct computation impractical.
Gradient descent overcomes this predicament by approaching the minima in a stepwise manner. It continually updates the model parameters based on the observed error, thereby minimizing the loss function.
At each iteration, the algorithm 'follows the slope' by moving in the direction that shows the most rapid decrease in the cost function.
-
Initializing Model Parameters: Begin by setting the model's parameters randomly or with specific initialization techniques.
-
Computing the Loss Gradient: Evaluate the gradient of the loss function with respect to the model parameters. This step identifies the direction of maximum increase in the loss function.
-
Updating the Parameters: Adjust the current parameter values in the direction opposite to the gradient, leading to a reduction in the loss.
The update rule for each parameter, denoted as
$\theta_i$ , can be expressed as:
where
- Repeating Iterations: This process continues for a set number of iterations or until the improvement in the loss function falls below a specified threshold.
-
Batch Gradient Descent: Utilizes the entire dataset for each iteration. This method is computationally intensive and might be slow in the context of big data.
-
Stochastic Gradient Descent (SGD): Uses a single randomly selected data point to compute the gradient and update the model parameters. Although this method is more random, it's computationally efficient, especially when dealing with large datasets.
-
Mini-Batch Gradient Descent: A blend of both batch and stochastic gradient descent. It uses a small, fixed number of data points for each iteration. This method combines the advantages of the other two methods: it's computationally efficient and less prone to random fluctuations.
-
Learning Rate: The step size in the direction of the negative gradient. Selecting an appropriate learning rate is crucial for the convergence and stability of the algorithm.
-
Convergence: An effective gradient descent algorithm should converge to an optimal solution. This might involve monitoring the change in the loss function across iterations.
-
Model Initialization: As the performance of gradient descent can be sensitive to the starting point, techniques like Xavier and Glorot initialization are often used to set initial values.
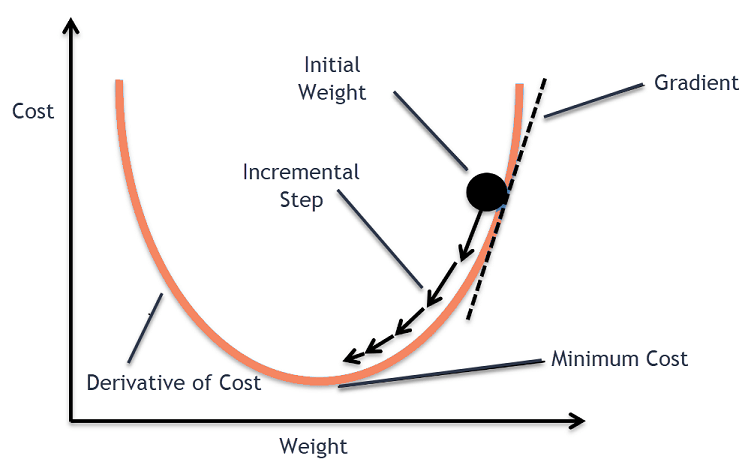
- Initialization: We start at a random point in the parameter space.
- Derivative Computation: The derivative (or gradient) gives the direction of steepest ascent.
- Parameter Update: By moving in the opposite direction of the gradient and scaling the movement by the learning rate, we reduce the loss.
- Convergence: The process is repeated until it converges to the minimum.
It is essential to recognize when \ how sufficient conditions of convergence are met.
-
Global vs. Local Minima: Gradient descent might converge to a local rather than the global minimum. This problem is more pronounced in non-convex loss functions.
-
Convergence Rate: This is about how quick or slow the algorithm reaches equilibrium and will depend on the choice of learning rate, data, and model characteristics.
Fortunately, there exist strategies and techniques to enhance the algorithm to circumvent such obstacles. And, a successful convergence promises a solution that at least represents a local minimum of the loss function.
In Gradient Descent optimization, the primary task involves minimizing a Cost Function. This function maps the relationship between model parameters and the accuracy or error of predictions.
-
Discovering Optimal Parameters: The purpose of Gradient Descent is to identify model parameters that minimize the cost function, thereby making predictions as accurate as possible.
-
Quantifying Model Performance: The cost function acts as a measurable representation of the model's predictive accuracy or inaccuracy.
-
Continuous Improvement: Through iterations, gradient descent refines the model by systematically adjusting the parameters to minimize cost.
Some datasets and machine learning tasks come with natural choices for the cost function. A few common ones include:
- Mean Squared Error (MSE): Ideal for regression tasks.
- Cross-Entropy (Log Loss): Suited for binary and multi-class classification tasks.
- Hinge Loss: Beneficial for binary classification, especially in Support Vector Machines.
The cost function, represented as
For instance, in a linear regression, the cost function
where:
-
$m$ is the number of training examples. -
$h_{\theta}(x^{(i)})$ is the predicted value. -
$y^{(i)}$ is the actual value.
The key to minimizing the cost function is to refine the model's predictions. This is accomplished through a feedback mechanism, where the errors in predictions are used to update model parameters. The ultimate goal is to minimize the empirical risk, or the average error over the training data.
Minimizing the cost function is equivalent to finding the parameter set, denoted as $\theta^$ or $\beta^$, where the predictions align most closely with the actual values, thus optimizing the inductive bias of the model.
- Calculate Predictions: For each data point, use the current model parameters to make predictions.
- Compute Errors: Find the discrepancies between predicted and actual values.
- Evaluate Cost: Use the cost function to measure the overall error, which needs to be minimized.
- Update Parameters: Using the gradient of the cost function, adjust model parameters to reduce errors in predictions.
- Repeat: Steps 1-4 iteratively over the training data until the cost function is minimized.
Here is the Python code:
def mean_squared_error(predictions, actual):
return np.mean((predictions - actual) ** 2)
# Calculate the cost using current parameter values and evaluate the performance
cost = mean_squared_error(model.predict(X_train), y_train)
# Adjust model parameters using gradient and update through backpropagationWhen we use derivative information in gradient descent, it enables us to find the direction of steepest descent in the multidimensional space. This guides the iterative process of cost function minimization, a fundamental step in optimizing machine learning models.
-
Time Efficiency: Instead of a full-scale search of the entire parameter space, the derivative helps identify the direction of fastest decrease in the cost function.
-
Convergence: By focusing on the most promising regions, the algorithm is more likely to converge to the optimal solution. The derivative provides essential information for determining when to stop iteration, based on specific convergence criteria.
-
Global Orientation: The sign of the derivative indicates whether the function is increasing or decreasing. This drives the algorithm toward regions of lower cost.
-
Local Scale: The magnitude of the derivative (slope) provides immediate feedback on how steeply the cost function is changing. Large derivatives indicate steep inclines or declines, while small derivatives correspond to gentle slopes.
-
Rate of Change: Mathematically, the derivative (or gradient, in multi-dimensional spaces) specifies the rate of change of the cost function with respect to each model parameter. This rigorously defines the direction of steepest descent, as well as the step size based on the learning rate.
Here is the Python code:
import numpy as np
# Define the cost function
def cost_function(x):
return x**2 + 5 # Example function: f(x) = x^2 + 5
# Define the derivative of the cost function
def derivative(x):
return 2*x # Derivative of the above function: f'(x) = 2x
def gradient_descent(learning_rate, iterations):
x = 0 # Initial guess for the minimum
for _ in range(iterations):
slope = derivative(x)
step = learning_rate * slope
x = x - step
return x
learning_rate = 0.1
iterations = 100
optimal_x = gradient_descent(learning_rate, iterations)
print(optimal_x)In this code, the derivative function computes the derivative of the cost function, and the gradient_descent function updates the parameter x iteratively, following the direction indicated by the derivative.
Batch Gradient Descent is a foundational optimization algorithm used in training supervised learning models. It computes the gradients of the cost function for the entire dataset in each iteration.
The algorithm involves three fundamental computations:
-
Cost Function: Measures how well the model predicts the training data.
-
Model Predictions: The algorithm uses the model's input to make predictions.
-
Gradient Computation: This is the most computation-intensive step. The algorithm computes the gradient of the cost function with respect to the model's parameters.
-
Advantages:
- Mathematically Guaranteed to Converge: Under certain conditions, Batch GD will converge to the global minimum.
- Pareto Efficiency: Maintains a record of the best update so far.
- Accurate: Computes precise gradients with the entire dataset.
-
Disadvantages:
- Computationally Inefficient: Processing the entire dataset can be slow and memory-intensive, especially with large datasets.
- Lack of Stochasticity: May get stuck in sharp or narrow minima and doesn't benefit directly from the regularization effect of noise in 'stochastic' methods.
- Memory Requirements: It requires data to fit in memory.
Here is the Python code:
def compute_gradient(parameters, data):
# Your method for computing gradients goes here
pass
def batch_gradient_descent(data, initial_parameters, learning_rate, num_iterations):
parameters = initial_parameters
for _ in range(num_iterations):
gradients = compute_gradient(parameters, data)
parameters -= learning_rate * gradients
return parametersStochastic Gradient Descent (SGD) is a variant of the traditional Gradient Descent algorithm designed to handle large datasets more efficiently.
While traditional Gradient Descent calculates the gradient on the whole dataset to update parameters, SGD does it for individual or small sets of samples. This results in faster, but potentially noisier, convergence.
The algorithm entails these key steps:
-
Initialization: Set an initial parameter guess theta and configure learning rate alpha.
-
Random Selection: Choose a mini-batch or a single data point randomly.
-
Calculate Gradient: Compute the cost and partial derivatives with respect to each parameter for the chosen data points.
-
Update Parameters: Adjust each parameter based on the calculated gradient and the learning rate.
-
Convergence Checking: Repeat steps 2–4 until a stopping criterion is met.
Here is the Python code:
import numpy as np
# Data preparation
X = 2 * np.random.rand(100, 1)
y = 4 + 3 * X + np.random.randn(100, 1)
X_b = np.c_[np.ones((100, 1)), X]
# SGD parameters
n_epochs = 50
t0, t1 = 5, 50 # hyperparameters
def learning_schedule(t):
return t0 / (t + t1)
# SGD
theta = np.random.randn(2, 1)
for epoch in range(n_epochs):
for i in range(100):
random_index = np.random.randint(100)
xi, yi = X_b[random_index:random_index+1], y[random_index:random_index+1]
gradients = 2 * xi.T.dot(xi.dot(theta) - yi)
eta = learning_schedule(epoch * 100 + i)
theta = theta - eta * gradientsIn this example, we use Stochastic Gradient Descent to find the parameters for a simple linear regression model.
-
Computation Efficiency: SGD processes smaller, randomly sampled data points, ideal for vast datasets.
-
Memory Efficiency: With its mini-batch approach, SGD requires less memory, making it suitable for systems with memory constraints.
-
Potential for Improved Generalization: The noise in parameter updates can make the model explore different local minima, leading to potentially better generalization.
-
Convergence to Local Minima: The noisiness can cause the algorithm to oscillate around the minimum, making it prone to getting stuck in local optima.
-
Parameter Tuning Sensitivity: Choosing the ideal learning rate can be more challenging due to the noise, and it might require additional tuning of
$t_0$ and$t_1$ in the learning schedule. -
May Converge to a Noisier Region: Due to its random nature, SGD might not reach the exact minimum achievable by traditional Gradient Descent methods.
Mini-batch Gradient Descent (Batch GD) is a compromise between Stochastic GD and Batch GD methods, aiming to reconcile their individual strengths.
- Update Frequency: After processing the entire dataset
- Robustness: Provides accurate updates leveraging complete dataset information but might converge slowly, particularly for extensive datasets.
- Update Frequency: After processing each data point
- Robustness: Efficient for large datasets but can be erratic and struggle near convergence, as each data point's influence can be too significant.
- Update Frequency: After processing a subset (mini-batch) of the dataset
- Robustness: Balanced approach that offers speed and stability.
-
Initialize: Choose learning rate
$\alpha$ and define mini-batch size. - Randomize Data: Shuffle the dataset to form mini-batches.
- Iterate: For each mini-batch, update parameters.
- Convergence Check: Discontinue once stopping criteria are met.
Here is the Python code:
import numpy as np
def mini_batch_gradient_descent(X, y, theta, learning_rate=0.01, iterations=100, batch_size=10):
m = len(y) # Number of training examples
num_batches = int(m / batch_size)
for _ in range(iterations):
# Shuffle data and split into mini-batches
permutation = np.random.permutation(m)
X_shuffled = X[permutation]
y_shuffled = y[permutation]
for i in range(num_batches):
start = i * batch_size
end = min(start + batch_size, m)
X_batch, y_batch = X_shuffled[start:end], y_shuffled[start:end]
# Compute gradient and update parameters
gradient = 1 / batch_size * X_batch.T.dot(X_batch.dot(theta) - y_batch)
theta -= learning_rate * gradient
return thetaGradient Descent (GD) in its basic form updates model parameters
In these scenarios, the step size, or learning rate, often needs to be kept small to prevent overshooting past the minimum. However, a small learning rate leads to slow convergence.
Researchers have developed momentum as an enhancement to traditional GD, aiming to address these issues.
In momentum-aided GD, the next update to the parameters,
where
-
The first term,
$\mu \cdot \Delta \theta_{\text{previous}}$ , represents the "momentum" or accumulated velocity from previous updates. If the path to the minimum is long and winding, this momentum ensures a more consistent direction of movement, helping it navigate through plateaus and local minima more effectively. -
The second term,
$- \text{learning rate} \cdot \nabla_\theta J( \theta )$ , is the traditional gradient term, indicating the current direction in the parameter space that leads to a decrease in the cost function.
Typically, a momentum value,
Adagrad, RMSprop, and Adam optimizers are all variations of the stochastic gradient descent (SGD) algorithm that aim to improve its efficiency and convergence characteristics.
Each optimizer has its unique features, benefits, and drawbacks, catering to different datasets and models. Let's take a closer look at each.
- Adagrad adapts the learning rate for each parameter
$w_i$ based on the accumulated squared gradient for that parameter up to the current time step$t$ :
- The strengths of individual parameters are naturally taken into account. However, this approach can lead to an excessively small learning rate over time.
- RMSprop addresses Adagrad's issue of the monotonically decreasing learning rate by accumulating only a fraction
$\rho$ of previous squared gradients and updating the parameters based directly:
- This method ensures a balance between adapting to recent gradients and maintaining a sufficient learning rate.
-
Adam further improves upon RMSprop by incorporating adaptive momentum. It computes the gradients' first and second moments, giving rise to the
$m_t$ and$v_t$ variables. -
The unbiased estimation of
$m_t$ and$v_t$ at the start of the optimization addresses Adam's bias towards zero, especially during early iterations:
$ m_t \leftarrow \beta_1 \cdot m_{t-1} + (1 - \beta_1) \cdot \nabla w_t $ $ v_t \leftarrow \beta_2 \cdot v_{t-1} + (1 - \beta_2) \cdot \nabla w_t \cdot \nabla w_t $ $ \hat{m}_t = \frac{m_t}{1 - \beta_1^t} $ $ \hat{v}t = \frac{v_t}{1 - \beta_2^t} $ $ w{t+1} = w_t - \frac{\eta}{\sqrt{\hat{v}_t} + \epsilon} \cdot \hat{m}_t $
- Adam has become a popular choice in recent years due to its robust performance across a wide range of ML tasks.
Let's look at how vanishing gradients can impede the performance of gradient-based optimization algorithms and at the solutions designed to mitigate this issue.
In deep neural networks, particularly those with many layers, multiplicative changes through layers can cause coding numerical reasoning difficulties. This results from gradients that become extremely small as they propagate backward through the network.
The problem is especially acute in activation functions like sigmoid or tanh, which saturate to very flat regions for large positive or negative inputs. Small gradients provide less information to update the model's earlier layers, leading to slower learning and, at times, little learning at all.
-
Poor Initialization: Vanishing gradients can lead to sub-optimal performance during model training if initial weights set the network in regions where gradients are minimal.
-
Long Valleys: The emergent valleys or troughs in the loss landscape become flatter as the network depth increases, compelling gradient-based methods to become stuck in these regions.
-
Saturated Outputs: Hidden layers in a network characterized by non-representative, excessively large, or tiny activations due to momentum transfer might cease learning.
Several techniques aim to address vanishing gradients:
-
Activation Function Selection: Using activation functions less prone to saturation such as ReLU or their variants.
-
Proper Weight Initialization: Methods like the Xavier/Glorot initializer help to initialize the weights such that the variance in activations across layers remains consistent.
-
Batch Normalization: This method introduces parameters that scale and translate the network's outputs at various layers and mitigate internal covariate shift.
-
Gated Recurrent Units (GRUs) and Long Short-Term Memory (LSTM) networks: Specialized models formulated to alleviate issues related to vanishing gradients in recurrent neural networks.
-
Weight Regularization: Techniques like L1 or L2 regularization restrict the model's parameter space, potentially avoiding large swings that yield vanishing gradients.
-
Residual Connections: These connections bypass one or more layers, representing an unobstructed path, which can help alleviate vanishing gradients.
-
Vanishing and Exploding Gradient: There are primarily two issues(Vanishing Gradient and Exploding Gradient) that a come as a problematic side-effect especially while working with deeper neural network. Use of modern activation functions and a tactic called clippping which restricts the gradient value with a specified range, are some of the solution to deal with underperforming deep neural networks.
-
Clipping: Mechanisms such as gradient clipping impose boundaries on the magnitude of the gradients, constraining the likelihood of extremely tiny gradients to some extent.UTF-8
Gradient clipping combats issues related to vanishing or exploding gradients during deep learning model training.
-
Vanishing Gradients: Occur in deep networks when early layers receive tiny gradients during backpropagation. This often results in slow convergence or even stagnation.
-
Exploding Gradients: Conversely, this involves exceptionally large gradients, possibly leading to numerical instability during optimization.
When the L2 norm of the gradient vector surpasses a defined threshold, the vector gets rescaled to ensure it remains within the set range. Doing so maintains the stability of the training process.
- Gradient Computation: Derive model parameter gradients using backpropagation.
- Calculate Norm: Measure the L2 norm (magnitude) of the gradient vector.
- Threshold Comparison: If the computed norm exceeds the preset threshold, scale the gradient vector to ensure it remains within the limit.
- Optimization Step: Update model parameters using the clipped gradient.
Here is the Python code:
# Define the model
model = SomeDeepLearningModel()
# Set learning rate and optimizer
learning_rate = 0.01
optimizer = tf.keras.optimizers.SGD(learning_rate)
# Define threshold for gradient clipping
clip_norm = 1.0
# Training loop
for epoch in range(num_epochs):
for batch in train_dataset:
with tf.GradientTape() as tape:
# Forward pass
output = model(batch)
# Compute loss
loss = compute_loss(output, batch)
# Get gradients
gradients = tape.gradient(loss, model.trainable_variables)
# Apply gradient clipping
clipped_gradients, _ = tf.clip_by_global_norm(gradients, clip_norm)
# Update model parameters
optimizer.apply_gradients(zip(clipped_gradients, model.trainable_variables))Explore all 50 answers here 👉 Devinterview.io - Gradient Descent