[Bug Report] MuJoCo/Walker2d left foot has different friction than right foot
#477
Comments
|
@Kallinteris-Andreas Yes that is crazy it wasn't fixed at the time for v4. This should affect the performance of older models but could you test training performance with 0.9 or 1.9 to know if it matters which value we use? |
|
The coeff supposed to be 1.9 or 2.0, 0.9 does not make sense, I will do a minimal test soon(-ish) |
MuJoCo/Walker2d left foot has different friction than left footMuJoCo/Walker2d left foot has different friction than right foot
|
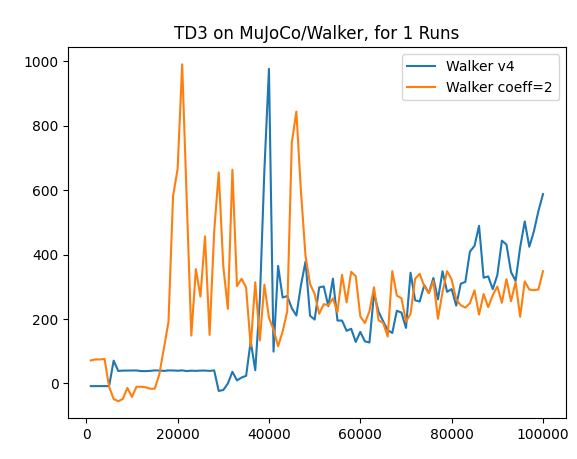
i can verify that the friction coeff does matter significantly impact the model unlike what was suggested in the previous issues. I will go with 2.0 since this is the value in |
|
What value is this with? |
|
friction=2 it says so in the legend |
|
Setting feet friction to 2.0 policy was trained with SB3/TD3 2mil steps I will try settings feet friction to 1.0 to see if we a get a model that can efficiency walk. Note: from the research [Walker2d-v1](https://github.com/openai/roboschool/blob/master/roboschool/mujoco_assets/walker2d.xml If any of you know where I could find any development documention as to why the models were designed the way they are, please let me know |
{kind=link}
|
I have set feet friction to 1.9, it appears to be walking (note: 2.0 would likely also be able to walk, but on that it may have developed that policy) |
Describe the bug
Right foot has a friction coeff of 0.9
https://github.com/Farama-Foundation/Gymnasium/blob/main/gymnasium/envs/mujoco/assets/walker2d.xml#L25
left foot has a friction coeff of 1.9
https://github.com/Farama-Foundation/Gymnasium/blob/main/gymnasium/envs/mujoco/assets/walker2d.xml#L38
This issue was previously reported, but not addressed.
openai/gym#1068
openai/gym#1646
from what I can tell, this is most likely a typo
both were supposed to be 1.9 (or 2.0)
Since
Walker2dandHopperwill be getting new models in v5 (cause google-deepmind/mujoco#833)should this be fixed there?
Code example
No response
System info
No response
Additional context
No response
Checklist
The text was updated successfully, but these errors were encountered: