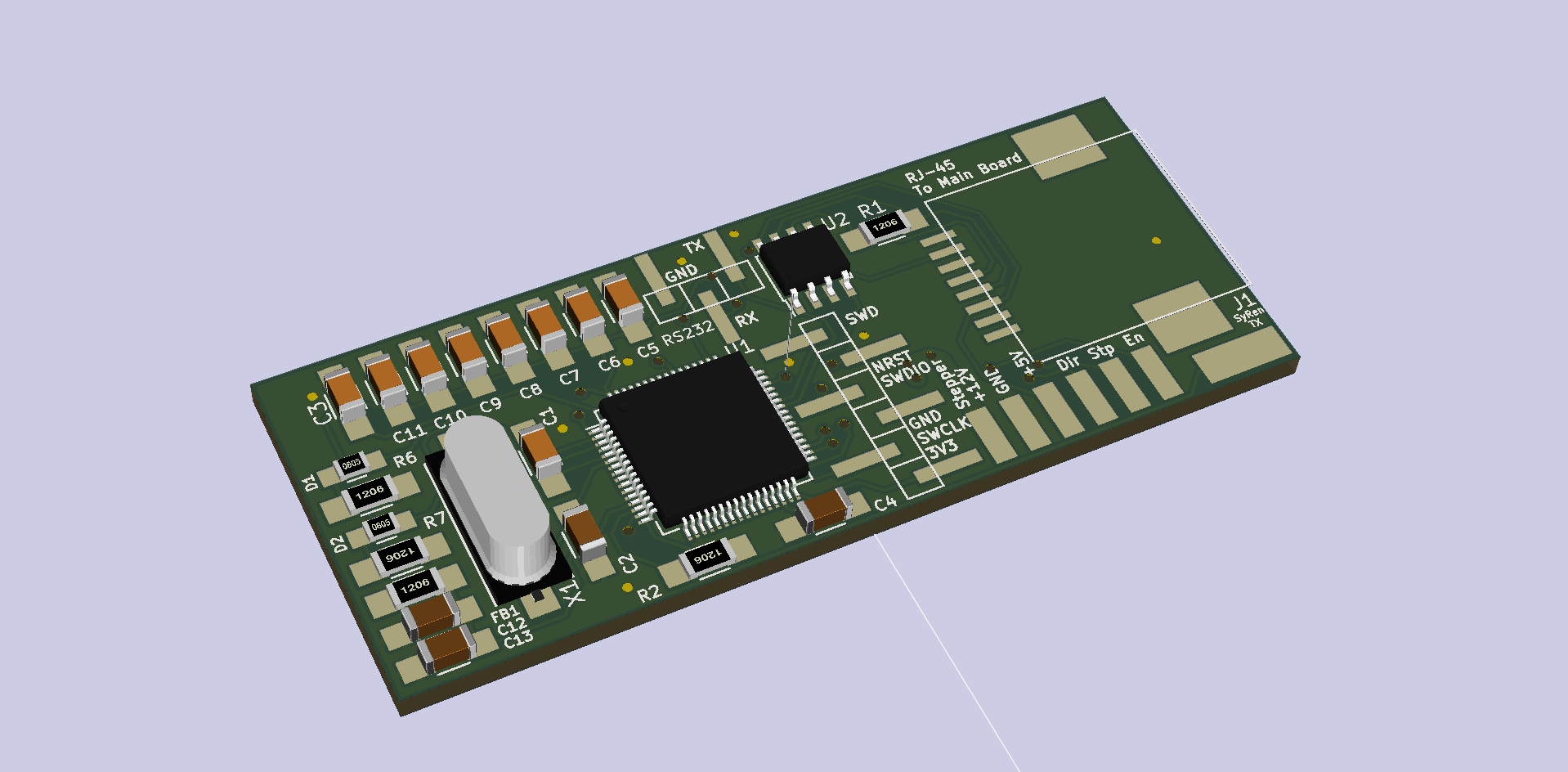
Each MAVRIC Wheel Pod contains a motor controller driving the wheel along with a stepper to rotate the entire pod, steering the rover. This board controls these components in a compact, modular form factor. One will be located at each of the six wheel pods.
Features:
- STM32F4 Microcontroller
- PWM output to motor driver controlling wheel speed
- Current measurement on motor driver to measure wheel traction
- Stepper motor output to rotate the wheel pod, steering the rover
- Encoder analog in for steering position feedback, fed into a control loop
- RJ45 Jack for rx/tx control/status data as well as powering the wheel pod's 3V3 and 5V rails
##PCB Progress:
https://github.com/ISU-MAVRIC/MAVRIC_WheelPod/releases/tag/v1.0
Current Price: $12.60 for 3 boards, $4.20 each
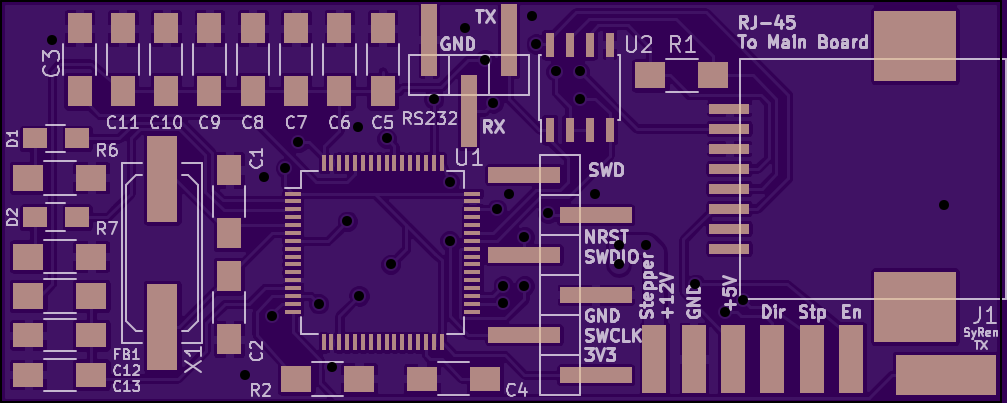
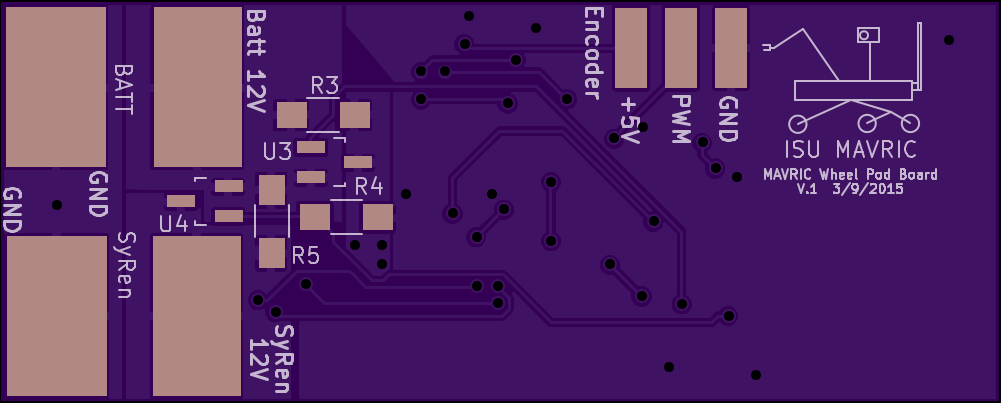
- .5mm layout
- .5mm traces when possible, down to .25mm for detailed routing