在平时场地操作手远程控制机器人的时候,想查看机器人内部数据,这种方法可以及其方便使数据显示在网站上,用手机或电脑输入链接即可实时查看。
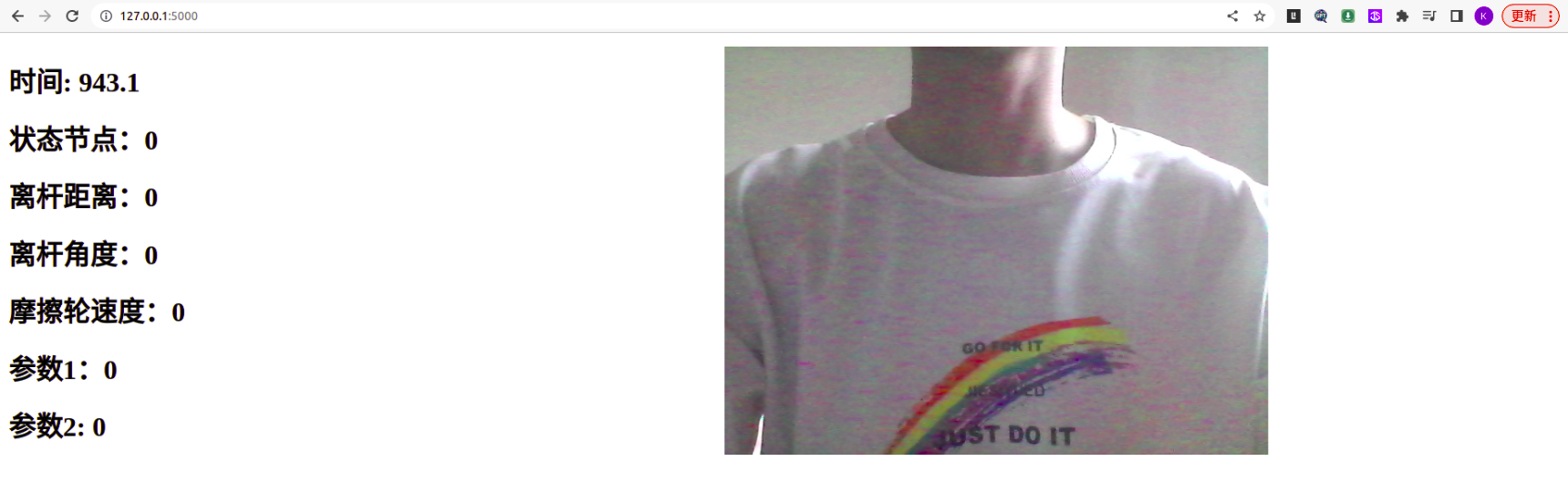
在我平常调机器人的时候,如果我想实时查看机器人的内部数据变化,那我只能进行debug,这样就相当于暂停机器人了,这样很不好,不方便。所以我基于此问题,我把机器人主机里的数据通过网络传到网页上,网页可以自己设计得符合各自的需求,我的项目把网页分为左右两部分,左边显示数据,右边显示机器人摄像头的图像。
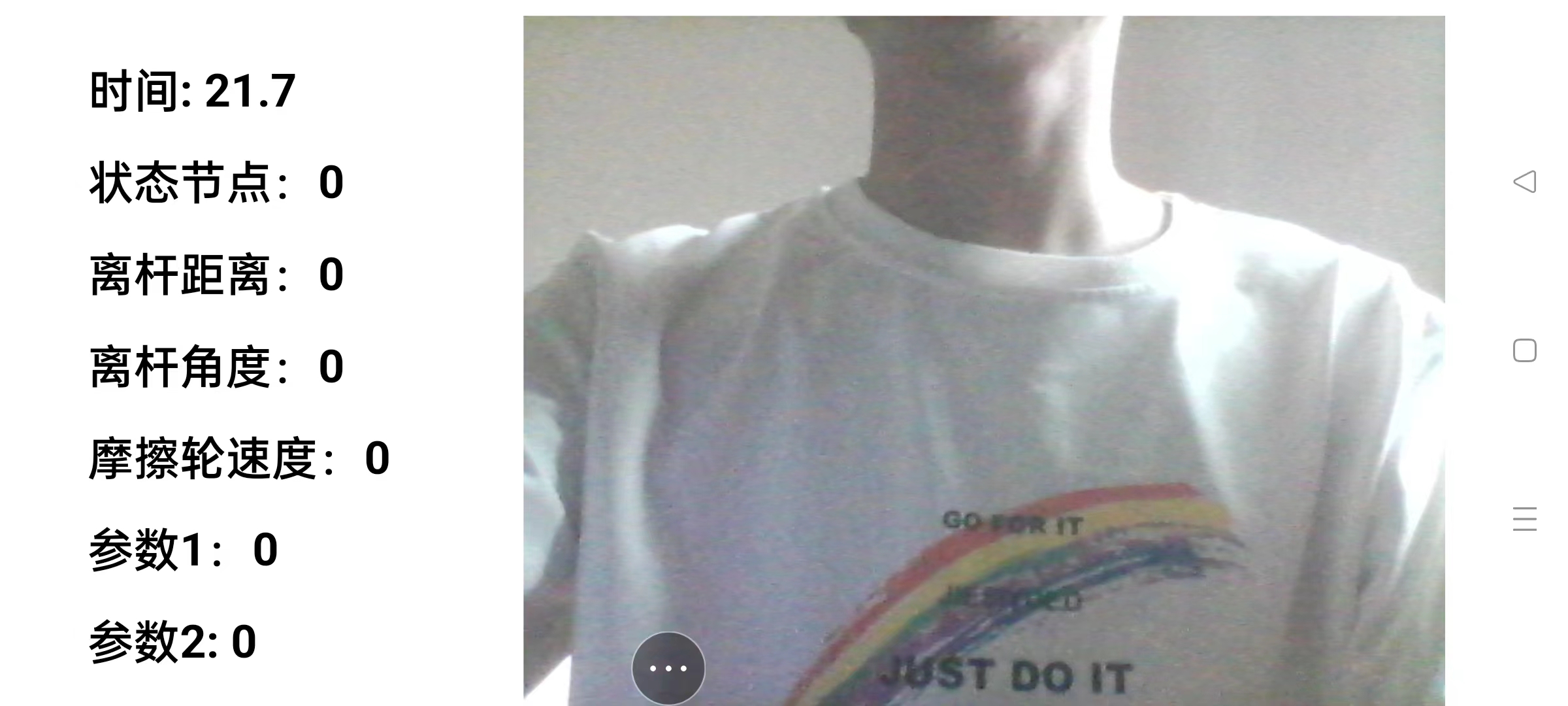
机器人主机要和您的可视化客户端处于一个局域网内,运行main.py,网页查看输入:http://127.0.0.1:5000(只能本地查看)或者:http://(本地ip地址):5000(可以其他主机查看)。 在手机查看时,建议设计网页全屏和手机设置自动旋转,这样观看效果更佳,这样方便把手机固定到手柄上方便操作手查看。
本来我是懒得解释代码的,因为我在代码里面已经写了充分的注释,然后我发现我和chatgpt聊天时的一些解释也挺详细的,就顺便复制过来了!