This package provides two trust region algorithms (TRA) for finding the minimum of some function, Levenberg-Marquardt and Powell's dogleg.
An example is included within the package, simply call:
import TRA as TRA
def forward_model(x):
y = np.array(x[0] ** 2 + x[1] ** 2)
y = y.reshape((1, 1))
return y
def compute_gradient(x):
g = np.array(([2 * x[0]], [2 * x[1]]))
g = g.reshape((2, 1))
return g
def compute_hessian(x):
h = np.array(([2, 0], [0, 2]))
h = h.reshape((2, 2))
return h
initial_prediction = np.array([5, 2.7])
LM_algorithm = TRA.Levenberg_Marquart(initial_prediction, compute_hessian, compute_gradient,
forward_model, d_param=1e-50,
lower_constraint=-np.inf,
upper_constraint=np.inf,
num_iterations=5)
minimum = LM_algorithm.optimisation_main()
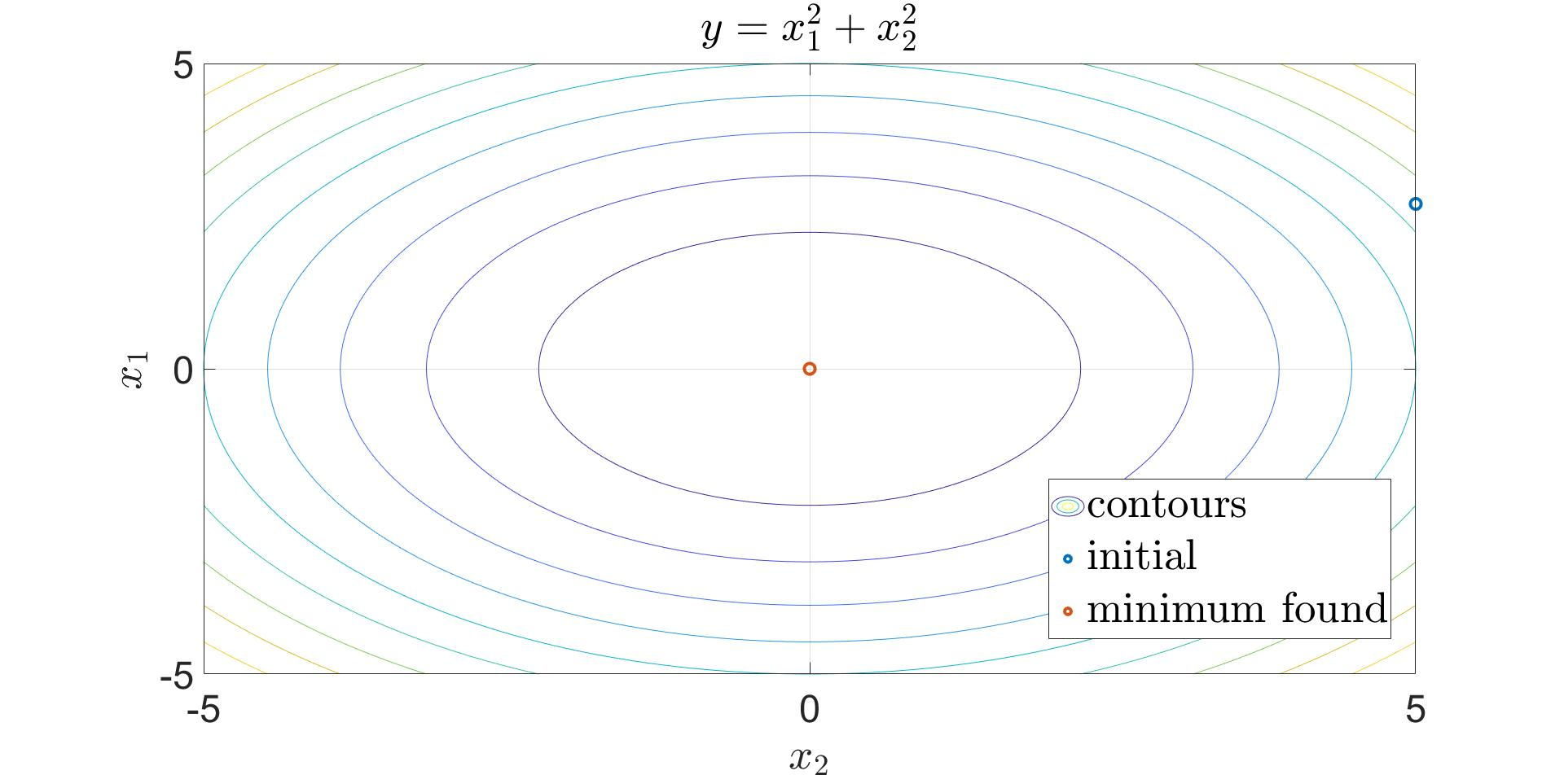
This is a simple example, but shows how to use the Levenberg_Marquart class.
There are a number of default values within the Levenberg_Marqaurdt class, including constraints on the solution, the number of iterations amd the damping parameter corresponding to the trust region. Three functions are required when instantiating a class object, one for computing the gradient, one for the Hessian and one for the mapping of the input to ouput (forward model).
:
def forward_model(x)
:
return f(x)
def compute_gradient(x):
:
return grad
def compute_hessian(x):
:
return hessian
initial_prediction = x0
LM_object = TRA.Levenberg_Marquart(initial_prediction, compute_hessian, compute_gradient,
forward_model, d_param=1e-50,
lower_constraint=-np.inf,
upper_constraint=np.inf,
num_iterations=5)
For the theory behind the code see [1] and [2].
[1] Jorge Nocedal and Stephen J. Wright (2006). Numerical Optimization.
[2] Andrew R. Conn, Nicholas I. M. Gould, and P.L. Toint (2000). Trust Region Methods.