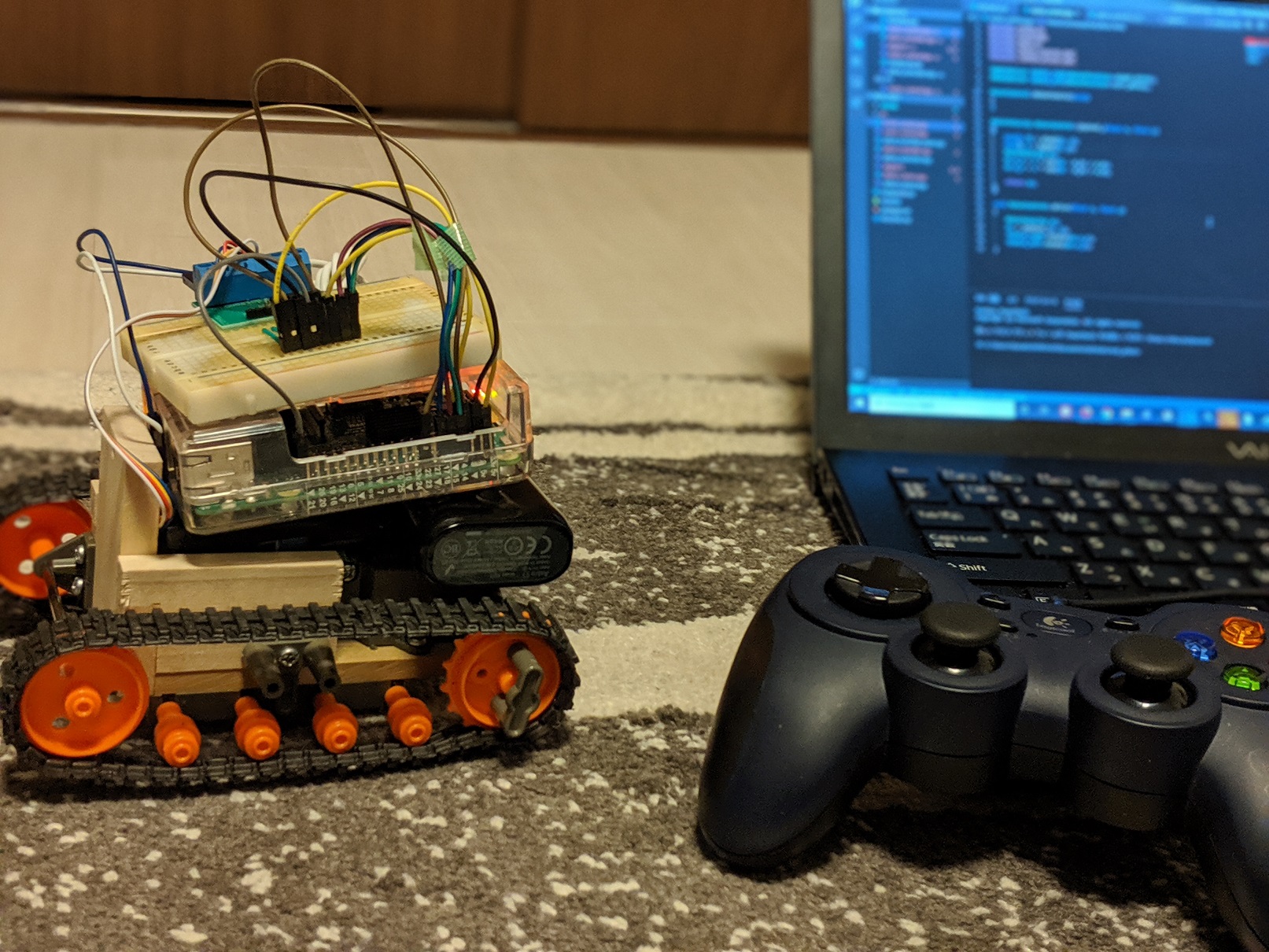

- Raspberry Pi 3 B+
- タミヤ ショベルドーザー工作基本セット
- モバイルバッテリー (Raspberry Piの電源)
- TB6612使用 Dual DCモータードライブキット
- 電池ボックス 単3×2本
- 各パーツを接続するワイヤー

Ubuntu-18.04.3 64bit (Rapsberry Pi 3 B+にインストールする)
Raspbianではないので、注意
https://index.ros.org/doc/ros2/Installation/Dashing/Linux-Install-Debians/
http://abyz.me.uk/rpi/pigpio/download.html 通りにインストール
wget https://github.com/joan2937/pigpio/archive/v74.zip
unzip v74.zip
cd pigpio-74
make
sudo make install
$ mkdir ros2_test_ws
$ cd ./ros2_test_ws
$ git clone https://github.com/KazumichiShirai/ros2_pibot.git
$ colcon build --symlink-install
$ sudo su
# . install/setup.bash
# ros2 run ros2_pibot pibot_controller
Raspbeey Piでは次のコマンドを実行して、pibot_controllerを実行
$ sudo su
# . install/setup.bash
# ros2 run ros2_pibot pibot_controller
gamepadを接続したPCがRaspberry piと同じネットワーク上にある状態で、そのPC上で次のコマンドを実行
$ ros2 run joy joy_node joy:=/controller/joy
~controller/joy (sensor_msgs/Joy)
- joy[X]とjoy[Y]をもらい、その値に応じて2つのモーターを制御する
- drive(X, Y): XとYのRageは[-1.0:1.0]
- https://www.openrtm.org/openrtm/sites/default/files/6135/161110-06.pdf
- http://abyz.me.uk/rpi/pigpio/download.html 通りにインストール
- pigpioの関数は、スーパーユーザ権限でないと実行できない
$ sudo su
# . install/setup.bash
上記のコマンドをしてから実行
- logicool gamepad f310
- sudo apt install ros2-dashing-joy
- sudo apt install ros-dashing-joy-teleop
export ROS_DOMAIN_ID=27
ros2 run joy joy_node joy:=/controller/joy
- ROS_DOMAIN_IDで接続
- VMWareを使っている場合は、ブリッジ接続にする