Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Update neopixel dep
- Loading branch information
Showing
12 changed files
with
186 additions
and
160 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,7 +1,7 @@ | ||
| built | ||
| node_modules | ||
| yotta_modules | ||
| yotta_targets | ||
| pxt_modules | ||
| *.db | ||
| *.tgz | ||
| built | ||
| node_modules | ||
| yotta_modules | ||
| yotta_targets | ||
| pxt_modules | ||
| *.db | ||
| *.tgz |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,18 @@ | ||
| { | ||
| "target": "microbit", | ||
| "targetVersion": "1.1.40", | ||
| "name": "robotbit", | ||
| "meta": {}, | ||
| "editor": "tsprj", | ||
| "pubId": "", | ||
| "pubCurrent": false, | ||
| "_rev": null, | ||
| "id": "c95ea169-4faa-4917-0c9c-80a8e8a0d6e7", | ||
| "recentUse": 1531137545, | ||
| "modificationTime": 1531137545, | ||
| "blobId": null, | ||
| "blobVersion": null, | ||
| "blobCurrent": false, | ||
| "isDeleted": false, | ||
| "path": "pxt-robotbit" | ||
| } |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,19 +1,19 @@ | ||
| { | ||
| "editor.formatOnType": true, | ||
| "files.autoSave": "afterDelay", | ||
| "files.watcherExclude": { | ||
| "**/.git/objects/**": true, | ||
| "**/built/**": true, | ||
| "**/node_modules/**": true, | ||
| "**/yotta_modules/**": true, | ||
| "**/yotta_targets": true, | ||
| "**/pxt_modules/**": true | ||
| }, | ||
| "search.exclude": { | ||
| "**/built": true, | ||
| "**/node_modules": true, | ||
| "**/yotta_modules": true, | ||
| "**/yotta_targets": true, | ||
| "**/pxt_modules": true | ||
| } | ||
| { | ||
| "editor.formatOnType": true, | ||
| "files.autoSave": "afterDelay", | ||
| "files.watcherExclude": { | ||
| "**/.git/objects/**": true, | ||
| "**/built/**": true, | ||
| "**/node_modules/**": true, | ||
| "**/yotta_modules/**": true, | ||
| "**/yotta_targets": true, | ||
| "**/pxt_modules/**": true | ||
| }, | ||
| "search.exclude": { | ||
| "**/built": true, | ||
| "**/node_modules": true, | ||
| "**/yotta_modules": true, | ||
| "**/yotta_targets": true, | ||
| "**/pxt_modules": true | ||
| } | ||
| } |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,36 +1,36 @@ | ||
|
|
||
| // A task runner that calls the PXT compiler and | ||
| { | ||
| "version": "0.1.0", | ||
|
|
||
| // The command is pxt. Assumes that PXT has been installed using npm install -g pxt | ||
| "command": "pxt", | ||
|
|
||
| // The command is a shell script | ||
| "isShellCommand": true, | ||
|
|
||
| // Show the output window always. | ||
| "showOutput": "always", | ||
|
|
||
| "tasks": [{ | ||
| "taskName": "deploy", | ||
| "isBuildCommand": true, | ||
| "problemMatcher": "$tsc", | ||
| "args": [""] | ||
| }, { | ||
| "taskName": "build", | ||
| "isTestCommand": true, | ||
| "problemMatcher": "$tsc", | ||
| "args": [""] | ||
| }, { | ||
| "taskName": "clean", | ||
| "isTestCommand": true, | ||
| "problemMatcher": "$tsc", | ||
| "args": [""] | ||
| }, { | ||
| "taskName": "serial", | ||
| "isTestCommand": true, | ||
| "problemMatcher": "$tsc", | ||
| "args": [""] | ||
| }] | ||
| } | ||
|
|
||
| // A task runner that calls the PXT compiler and | ||
| { | ||
| "version": "0.1.0", | ||
|
|
||
| // The command is pxt. Assumes that PXT has been installed using npm install -g pxt | ||
| "command": "pxt", | ||
|
|
||
| // The command is a shell script | ||
| "isShellCommand": true, | ||
|
|
||
| // Show the output window always. | ||
| "showOutput": "always", | ||
|
|
||
| "tasks": [{ | ||
| "taskName": "deploy", | ||
| "isBuildCommand": true, | ||
| "problemMatcher": "$tsc", | ||
| "args": [""] | ||
| }, { | ||
| "taskName": "build", | ||
| "isTestCommand": true, | ||
| "problemMatcher": "$tsc", | ||
| "args": [""] | ||
| }, { | ||
| "taskName": "clean", | ||
| "isTestCommand": true, | ||
| "problemMatcher": "$tsc", | ||
| "args": [""] | ||
| }, { | ||
| "taskName": "serial", | ||
| "isTestCommand": true, | ||
| "problemMatcher": "$tsc", | ||
| "args": [""] | ||
| }] | ||
| } |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,20 +1,20 @@ | ||
| The MIT License (MIT) | ||
|
|
||
| Copyright (c) 2017 Riven | ||
|
|
||
| Permission is hereby granted, free of charge, to any person obtaining a copy of | ||
| this software and associated documentation files (the "Software"), to deal in | ||
| the Software without restriction, including without limitation the rights to | ||
| use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of | ||
| the Software, and to permit persons to whom the Software is furnished to do so, | ||
| subject to the following conditions: | ||
|
|
||
| The above copyright notice and this permission notice shall be included in all | ||
| copies or substantial portions of the Software. | ||
|
|
||
| THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR | ||
| IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS | ||
| FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR | ||
| COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER | ||
| IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN | ||
| The MIT License (MIT) | ||
| Copyright (c) 2017 Riven | ||
| Permission is hereby granted, free of charge, to any person obtaining a copy of | ||
| this software and associated documentation files (the "Software"), to deal in | ||
| the Software without restriction, including without limitation the rights to | ||
| use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of | ||
| the Software, and to permit persons to whom the Software is furnished to do so, | ||
| subject to the following conditions: | ||
| The above copyright notice and this permission notice shall be included in all | ||
| copies or substantial portions of the Software. | ||
| THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR | ||
| IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS | ||
| FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR | ||
| COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER | ||
| IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN | ||
| CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE. |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,10 +1,10 @@ | ||
| all: deploy | ||
|
|
||
| build: | ||
| pxt build | ||
|
|
||
| deploy: | ||
| pxt deploy | ||
|
|
||
| test: | ||
| pxt test | ||
| all: deploy | ||
|
|
||
| build: | ||
| pxt build | ||
|
|
||
| deploy: | ||
| pxt deploy | ||
|
|
||
| test: | ||
| pxt test |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,40 +1,40 @@ | ||
| # robotbit | ||
|
|
||
| Extension for Kittenbot Robotbit | ||
|
|
||
| ## Feature | ||
|
|
||
| - Designed for robotic projects over microbit | ||
| - On board battery source | ||
| - Drive 8x servos and 4x DC motors and the same time (with 3.7v battery source to VM) | ||
| - Drive 2x Micro Stepper Motors | ||
| - On board buzzer | ||
| - On board 4x RGB Neo Pixels | ||
|
|
||
| # Blocks Preview | ||
|  | ||
|
|
||
| # Hardware Preview | ||
| ## Front | ||
| 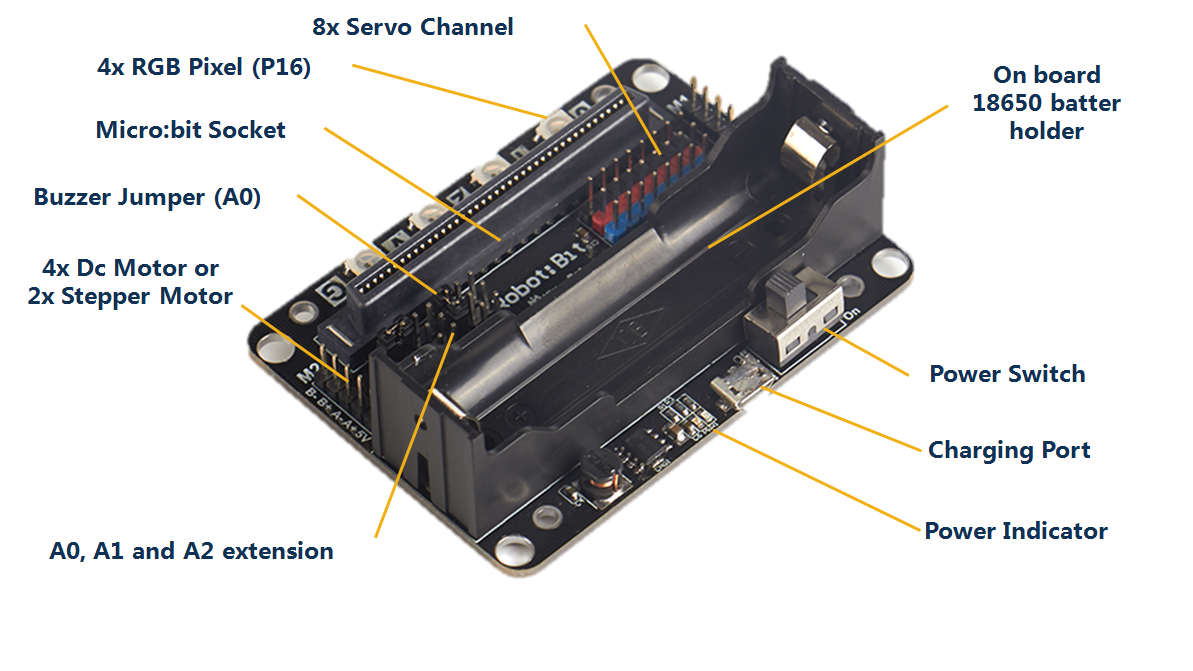 | ||
|
|
||
| ## Back | ||
|  | ||
|
|
||
|
|
||
| ---------- | ||
|
|
||
| For more infomation please visit [http://kittenbot.cc/bbs/](http://kittenbot.cc/bbs/ "Kittenbot BBS") | ||
|
|
||
| ## License | ||
|
|
||
| MIT | ||
|
|
||
| ## Supported targets | ||
|
|
||
| * for PXT/microbit | ||
| (The metadata above is needed for package search.) | ||
|
|
||
| ```package | ||
| robotbit=github:Kittenbot/pxt-robotbit | ||
| # robotbit | ||
|
|
||
| Extension for Kittenbot Robotbit | ||
|
|
||
| ## Feature | ||
|
|
||
| - Designed for robotic projects over microbit | ||
| - On board battery source | ||
| - Drive 8x servos and 4x DC motors and the same time (with 3.7v battery source to VM) | ||
| - Drive 2x Micro Stepper Motors | ||
| - On board buzzer | ||
| - On board 4x RGB Neo Pixels | ||
|
|
||
| # Blocks Preview | ||
|  | ||
|
|
||
| # Hardware Preview | ||
| ## Front | ||
|  | ||
|
|
||
| ## Back | ||
|  | ||
|
|
||
|
|
||
| ---------- | ||
|
|
||
| For more infomation please visit [http://kittenbot.cc/bbs/](http://kittenbot.cc/bbs/ "Kittenbot BBS") | ||
|
|
||
| ## License | ||
|
|
||
| MIT | ||
|
|
||
| ## Supported targets | ||
|
|
||
| * for PXT/microbit | ||
| (The metadata above is needed for package search.) | ||
|
|
||
| ```package | ||
| robotbit=github:Kittenbot/pxt-robotbit | ||
| ``` |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,16 +1,16 @@ | ||
| { | ||
| "robotbit.Servo|block": "舵机|%index|角度 %degree", | ||
| "robotbit.StepperDegree|block": "步进 28BYJ-48|%index|角度 %degree", | ||
| "robotbit.StepperTurn|block": "步进 28BYJ-48|%index|圈数 %turn", | ||
| "robotbit.StepperDual|block": "双步进(角度) |M1 %degree1| M2 %degree2", | ||
| "robotbit.StpCarMove|block": "步进小车 前进 |距离(cm) %distance|轮直径(mm) %diameter", | ||
| "robotbit.StpCarTurn|block": "步进小车 转向 |角度 %turn|轮直径(mm) %diameter|轮距(mm) %track", | ||
| "robotbit.MotorRun|block": "电机|%index|速度 %speed", | ||
| "robotbit.MotorRunDual|block": "电机|%motor1|速度 %speed1|%motor2|速度 %speed2", | ||
| "robotbit.MotorRunDelay|block": "电机|%index|速度 %speed|延时 %delay|s", | ||
| "robotbit.MotorStop|block": "电机 停止|%index|", | ||
| "robotbit.MotorStopAll|block": "停止所有电机", | ||
| "robotbit.Ultrasonic|block": "超声波|引脚 %pin", | ||
| "robotbit.MatrixDraw|block": "LED矩阵 描点|X %x|Y %y", | ||
| "robotbit.MatrixClear|block": "LED矩阵 清空" | ||
| { | ||
| "robotbit.Servo|block": "舵机|%index|角度 %degree", | ||
| "robotbit.StepperDegree|block": "步进 28BYJ-48|%index|角度 %degree", | ||
| "robotbit.StepperTurn|block": "步进 28BYJ-48|%index|圈数 %turn", | ||
| "robotbit.StepperDual|block": "双步进(角度) |M1 %degree1| M2 %degree2", | ||
| "robotbit.StpCarMove|block": "步进小车 前进 |距离(cm) %distance|轮直径(mm) %diameter", | ||
| "robotbit.StpCarTurn|block": "步进小车 转向 |角度 %turn|轮直径(mm) %diameter|轮距(mm) %track", | ||
| "robotbit.MotorRun|block": "电机|%index|速度 %speed", | ||
| "robotbit.MotorRunDual|block": "电机|%motor1|速度 %speed1|%motor2|速度 %speed2", | ||
| "robotbit.MotorRunDelay|block": "电机|%index|速度 %speed|延时 %delay|s", | ||
| "robotbit.MotorStop|block": "电机 停止|%index|", | ||
| "robotbit.MotorStopAll|block": "停止所有电机", | ||
| "robotbit.Ultrasonic|block": "超声波|引脚 %pin", | ||
| "robotbit.MatrixDraw|block": "LED矩阵 描点|X %x|Y %y", | ||
| "robotbit.MatrixClear|block": "LED矩阵 清空" | ||
| } |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1 +1 @@ | ||
| // tests go here; this will not be compiled when this package is used as a library | ||
| // tests go here; this will not be compiled when this package is used as a library |
Oops, something went wrong.