之前有个项目,要求无人机与地面站直接的通信由之前的数传改为wifi,搜了一圈,很多都属于手工调试,而且包含复杂的界面。然而实际需求要求稳定,自动化。因此为了满足这个需求只能是自己开发一个小工具。
在当前项目背景下,要实现的需求如下图所示
实际上,正常的无人机与地面之间的通信用的是数传模块,无人机和地面站之间都是通过串口连接到这个模块上。模块和模块之间的通信利用远程无线电进行通信。

但是,在一些特殊场景中,比如不能用无线电台的地方,敏感区域等,就只能想办法用其他的手段实现无人机与地面站的通信,而利用网络通信就是一个非常有效的手段。
项目开源在Github,下载地址:https://github.com/Li-Zhaoxi/uart2net
简单来说,串口转wifi干了什么事呢,就是将下图这个串口线,线的部分变成了无线网,或者局域网之间。

别看问题简单,应用的场景可多了:
- 局域网范围优势。拿校园网来说,校园网实际上是个超大规模的局域网,传输速度高达100MB/s,所以串口两端的设备都连上校园网,我可以在任何地方快速地控制设备。
- 局域网频段优势。数传模块的频段会有冲突,但网络不会,适用于大规模控制。
- 便宜。搞研究一般都在室内,有个路由器就够了(省下好几百数传模块的钱投资在头发上不香吗)。
- 应用范围广。可以远程调试串口,可以模拟任何两个串口之间的通信,省下一大堆串口线。
- 公网扩展。两个设备之间既然是利用网络通信就不仅仅局限于局域网,在无人机设备上插入SIM卡并不是什么难事,而且利用现在的5G技术,是可以快速传输无人机大量的图像数据的(5G尽管在民用上很贵,似乎不划算,但在工业圈非常重要,突破了网速限制,真的可以为所欲为)。
当然,缺点很明显,延迟会很高,受限于网络覆盖范围,如果需要野外大范围的飞行,还是得安装数传图传模块。
TB上是有卖串口转wifi的硬件,我这个是软件,跨平台,可以安装在x86平台,也可以安装在aarch64架构的嵌入式平台(比如jetson系列的嵌入式系统)。
改程序基于QT,所以无论在哪个平台,都要安装QT所支持的库。Windows下去下载exe安装包就行,Linux下用apt-get install 命令是可以直接安装QT的。
sudo apt-get install qt5-default
sudo apt-get install libqt5serialport5-devWINDOWS 下的使用方法
- 使用QTCreator加载当前uart2net.pro文件
- 在release模式下编译。
- 找到release版本的exe,与uart2net.ini单独放进一个文件夹。
- 如果需要发布到别的电脑,按照《QT 发布release版本》的方法,补充对应的dll文件。
- 编译通过后,此工程可以删掉。
- 配置ini文件,双击exe即可执行。
Linux下的使用方法(包含嵌入式Linux)
- 下载代码
git clone https://github.com/Li-Zhaoxi/uart2net - 进入文件路径
cd uart2net - 输入
qmake uart2net.pro - 编译
make all -j6 - 编译无错通过后,根据设备修改对应的ini文件。
- 输入
sudo ./uart2net(串口读写必须是管理员权限,也可以用chmod改掉这个串口权限)
配置文件可以用记事本打开,==切记修改时候里面不能有中文==:

- uart2net
- type:表示是服务端还是客户端,1表示服务端,2表示客户端
- heartbeattime:检测心跳,客户端必须设置(默认2000即可),否则无法检测断线并自动重连,服务器如果通信频繁可以设置0。(网络断开时候,程序是没法自动检测的,只能通过心跳)。
- RecordLog:默认0不要动,本意是想记录通信之间传递的数据(因为我实现一半时候觉得没必要)。
- showmessage:在控制台显示传递的数据,设置0就行。(因为设置1时候,满屏的二进制数,你也看不过来,前期自己调试用的)。
- serial-port
- **number **:串口号。windows下一般为 COM3 (3根据实际情况调整),Linux下一般为 /dev/ttyS3,后面的数字同样根据实际设备号调整。
- btl:串口波特率。
- TCP:
- hostip:服务端IP地址(仅用于客户端,但在服务端你不能删掉这行)。
- port:服务端端口号。
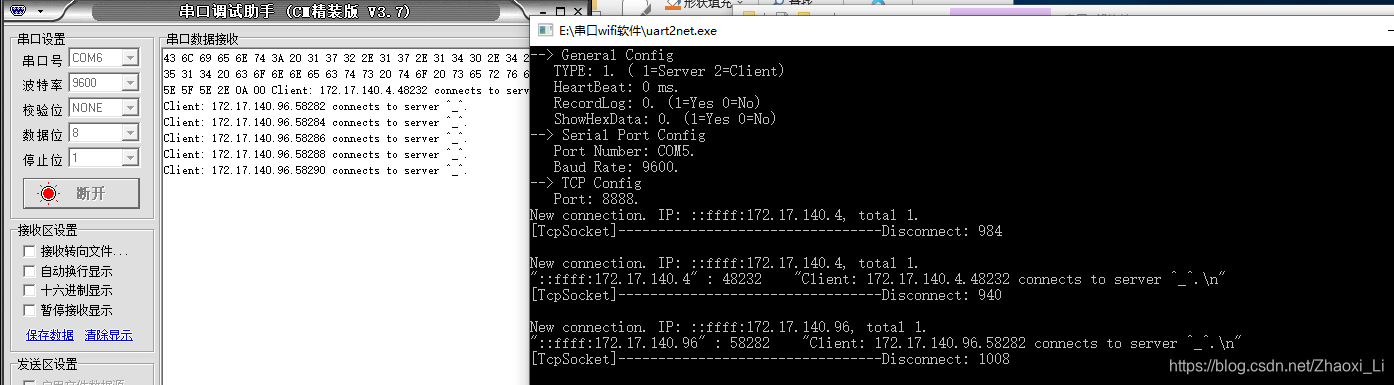
服务端,设备连接上之后会有显示,设备重连也会有显示。
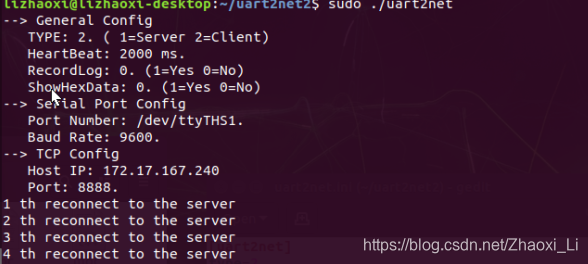
客户端,最开始时候服务端还没开,一直在重连。
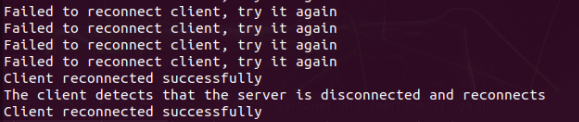
客户端,根据设置的心跳,2秒内没消息就重连。
写这个小工具大概花了我2周左右的时间,主要就利用QT的串口和网络通信,并没有使用多高深的软件技术。后面移植到无人机系统中前前后后联调修了一堆bug,对于我来说,这个东西的最大价值也许就是其稳定性,在不断的调试中得到了最优版本。
在未来有需求的话也会对其进行进一步升级(毕竟这东西思想上容易,实际上调试巨麻烦),比如:
- 心跳包不再占用数据通信的socket,两端都可以检测对方是否还活着
- 现在是一对设备就创建一个服务端和客户端,后续也会升级为创建一个服务器,每个设备都是一个客户端(类似局域网聊天器那种)。
- 有效的记录Log。设备发生意外,后续检查时候可以通过日志查看最后发送消息。(如果追求数据完整性,就得进来个数据存一次,导致IO变多,如果满足缓存再存,设备出故障容易异常关机,导致数据丢失)。
这次公布的是稳定版本,当然后续要是自己碰到需要更高级的需求,自己也会升级下这个。