Проект реализован и выложен на GitHub 15.11.2022
- Описание
- Запуск проекта
- Скриншоты симуляции
- Детали
- Спасибо за внимание, дорогой читатель! Вкусных пряников, друг :)
Привет, друг! 😃
В этом проекте, который я реализовал совместно с моими одногруппниками по вузу, представлена CoppeliaSim сцена лабиринта (англ. scene). В эту сцену включены четыре виртуальных мобильных робота: два робота с контактными датчиками на их бамперах (англ. bumper force sensors 💪), один робот левой руки и один робот правой руки, на которые установлены по три дистанционных датчика (англ. proximity sensors).
Хоть задание преподавателя в этом проекте и не выполнено (нужно было реализовать именно взаимодействующих роботов, исследующих лабиринт по оптимальным маршрутам каждый 🏃), но сил было вложено в работу много, поэтому я её выкладываю сюда на память.
Спасибо ребятам (одногруппникам КРМО-01-22 Егору, Лёхе, Ярику и Даниле 💥⭐), сотрудничающими со мной на протяжении выполнения этой работы — без их помощи и поддержки я бы не написал весь этот код!
Для запуска этого проекта Вам, читатель, необходима среда моделирования роботов CoppeliaSim (в прошлом V-REP; далее просто — Коппелиа), под которой и сделан этот проект. Код Питона этого репозитория запустится только в этой среде из-за некоторых специфических особенностей языковой обработки Коппелии (её препроцессора) и наличия объектов с её сцены (включая глобальный объект sim, стены лабиринта и роботов).
Кроме того, нужна версия не ниже 4.3.0 программы!:fire: В этой версии и был добавлен Питон.
После того, как Вы установите среду моделирования CoppeliaSim, откройте предварительно скачанную сцену репозитория и запустите симуляцию.
| ❗Так как Коппелиа использует внешний интерпретатор Питона — python.exe — то необходимо его установить, чтобы эта сцена успешно начала симулироваться. (см. оф. сайт https://www.python.org/downloads/) |
|---|
| 📝А можно, по Вашему желанию, переписать код сцены на Lua, который, кстати говоря, обработается Коппелией ещё быстрее и проще, нежели чем Python, как разработчики пишут в документации к симулятору. |
|---|
Папку репозитория "code" качать необязательно: в ней лежат скрипты роботов обсуждаемой сцены, а они уже и так в сцене.
Изначальный вид сцены CoppeliaSim:

Запуск симуляции: роботы ездят по лабиринту и исследуют его:
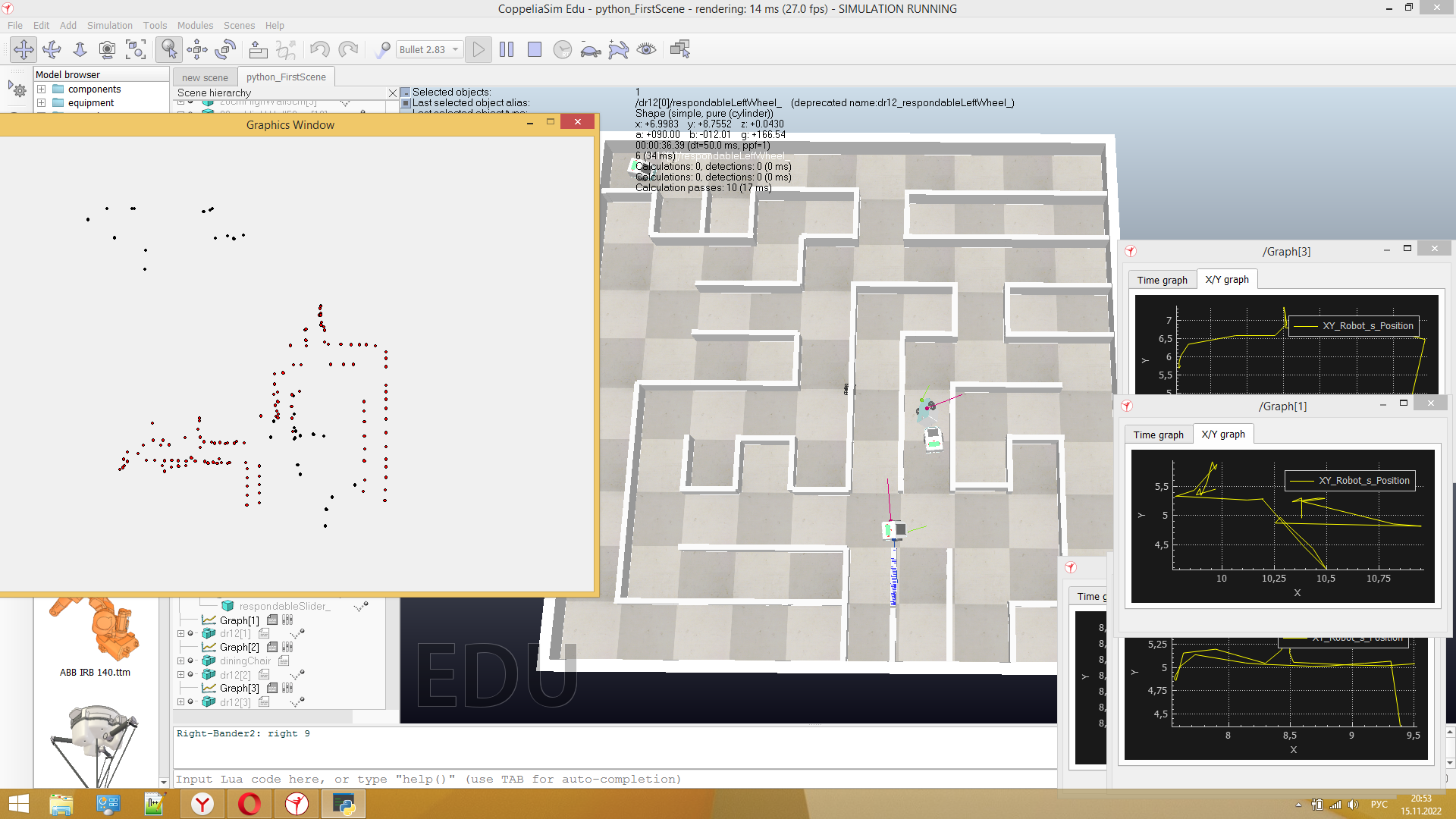
Карта, которую роботы рисуют вместе, используя свои датчики (это окно создаётся благодаря модулю graphics.py):

Три робота сцены:
- по середине находится робот со случайным алгоритмом исследования лабиринта (использует питоновский модуль random.py) (ещё один такой находится выше вне скриншота),
- слева находится робот, применяющий правило левой руки для объезда лабиринта,
- а справа — робот правой руки:

Для примера будет описан код робота правой руки dr12[3] 👉 (см. файл репозитория code/right_hand_robot.py). Он должен ехать по правым стенам лабиринта, ориентируясь на свой правый датчик Proximity_sensor[2] (выделен синим цветом):

Бампер у робота удалён. У него есть тело (body) (см. левое меню на скриншоте выше — снизу), левый и правый моторы (leftJoint_ и rightJoint_) и три дистанционных датчика, повёрнутых направо, вперёд и налево — для общей корректной ориентации в пространстве.
Скрипт этого робота можно открыть для редактирования и просмотра, дважды нажав на иконку листа правее самого объекта dr12[3] в левом навигационном меню CoppeliaSim:  .
.
В начале скрипта подключается библиотека random.py (она используется и в таком роботе) и объявляются глобальные переменные:
#python
include random ## обратите внимание, что не "import", а "include" в Коппелии!
## GLOBALS:
robot, leftJointHandle, rightJointHandle, changeOrientationTime, graph, X, Y = 0, 0, 0, 0, 0, 0, 0
proximitySensors = 0 ## datchiki
baseVelocity = 5 ## skorost
blockTime, Right90Time, flag = 0, 0, False ## to do turns properly
N = 4 ## robots amountДалее идёт череда нескольких вспомогательных функций, которые поворачивают робота в разные стороны и определяют его ориентацию в пространстве:
<...>
## to correctly draw detected points on map!
def orientation(Rxyz):
PI = math.pi
if (Rxyz > -PI/4) and (Rxyz <= PI/4):
return 'RIGHT'
elif (Rxyz > PI/4) and (Rxyz <= 3*PI/4):
return 'TOP'
elif ((Rxyz > 3*PI/4) and (Rxyz <= 5*PI/4)) or ((Rxyz < -3*PI/4) and (Rxyz >= -5*PI/4)):
return 'LEFT'
elif (Rxyz < -PI/4) and (Rxyz >= -3*PI/4):
return 'BOTTOM'
<...>После этого идёт функция инициализации 🌞 всех параметров робота:
##===========================================================
## Initialize a robot and his position graphics:
def init():
global robot, leftJointHandle, rightJointHandle, proximitySensors
robot = sim.getObject('.')
leftJointHandle = sim.getObject("./leftJoint_")
rightJointHandle = sim.getObject("./rightJoint_")
proximitySensors = dict()
proximitySensors.update(front=sim.getObject('./Proximity_sensor', {'index': 0}))
proximitySensors.update(left=sim.getObject('./Proximity_sensor', {'index': 1}))
proximitySensors.update(right=sim.getObject('./Proximity_sensor', {'index': 2}))
goAhead()
## Graph initialization:
global graph, X, Y
graph = sim.getObject('/Graph', {'index': 3})
X = sim.addGraphStream(graph, 'X coord', 'm')
Y = sim.addGraphStream(graph, 'Y coord', 'm')
sim.addGraphCurve(graph, 'XY Robot\'s Position', 2, [X,Y], [0,0], '')В функции init() создаются ссылки на:
- объект самого робота (переменная
robot), - объекты левого и правого моторов (переменные
leftJointHandleиrightJointHandle), - создаётся Python-словарь
dict proximitySensorsдля трёх датчиков робота, - вызывается функция
goAhead()движения робота вперёд, - в конце создаётся встроенный в симулятор граф (не окно с картой лабиринта), который будет показывать текущее местоположение робота на сцене (координаты
xиy).
Затем идёт центральная функция actuation(), которая определяет поведение робота в ходе симуляции. Робот ориентируется в зависимости от расстояния от правой, передней и левой стен лабиринта. Расстояние от стен измеряют соответствующие датчики. Например, 94-я строка кода:
<...>
detectedObjectHandle, detectedPoint, distance, result = sim.handleProximitySensor(proximitySensors['front'])[-2::-1]
<...>выполняет встроенную функцию Коппелии sim.handleProximitySensor(int sensorHandle) для запуска измерения расстояния 💻 и считывания результата с переднего (англ. front) датчика. Если переменная result при этом получит значение 0, то это говорит о том, что стена замечена не была спереди. (Если -1, то возникла какая-то ошибка.) А если 1, то стена замечена и соответствующие дистанция, координаты замеченной точки стены (относительно системы отсчёта самого датчика, а не сцены) и ссылка на выявленный объект будут в переменных distance, detectedPoint и detectedObjectHandle.
Далее исключаются из отмечания на карте другие роботы, (если замечены были они, а не стена лабиринта; почему-то это не работает, по сути — роботы всё равно отмечаются на карте 😟):
for i in range(N):
if i != 2:
if detectedObjectHandleRight == sim.getObject('/dr12', {'index': i}):
resultRight = -1
if detectedObjectHandle == sim.getObject('/dr12', {'index': i}):
result = -1
if detectedObjectHandleLeft == sim.getObject('/dr12', {'index': i}):
resultLeft = -1Дальше объявляются локальные переменные DISTMAX и DISTMIN, которые обозначают максимальное и минимальное расстояние езды робота от правой стены. Т.е. если сейчас расстояние от правой стены больше DISTMAX, то робот поворачивает немного правее, чтобы приблизиться к ней. То же с минимальной дистанцией.
При въезде в тупик робот разворачивается на 180 градусов функцией turnAround().
Ещё ниже (124-я и 125-я строки) следует немаловажный фрагмент кода:
elif (resultLeft == 0) and (resultRight == 1) and (result == 1):
turnLeft(math.pi/2)который повернёт робота налево, если справа и спереди тупик есть, а слева его нет.
Далее идёт вычисление текущей ориентации робота на сцене:
## Draw detected points on map:
Rxyz = sim.getObjectOrientation(robot, -1) ## rotations floats about axes Z, Y and X respectively
Rz = list(sim.alphaBetaGammaToYawPitchRoll(Rxyz[0], Rxyz[1], Rxyz[2]))[0] ## current robot rotation about !Z axe!для правильного отрисовывания замеченных точек лабиринта на карте.
И посылка сигнала "РИСОВАТЬ ТОЧКУ" другому скрипту, отвечающему за карту — скрипту объекта diningChair (см. файл репозитория code/graphics_map.py):
<...>
sim.setStringSignal('FEEL', str(position[0]) + ' ' + str(position[1]))
<...>Последняя функция скрипта
def sysCall_thread():
## Python thread initialization:
sim.setThreadAutomaticSwitch(True)
init()
## Python thread main loop:
while not sim.getThreadExistRequest():
actuation()создаёт отдельный дочерний питоновский процесс для выполнения всего этого скрипта. Эту функцию и запускает в самом начале главный процесс Коппелии. Можно сказать, что скрипт "праворукого" робота — child threaded script в терминологии разработчиков CoppeliaSim ![]() .
.