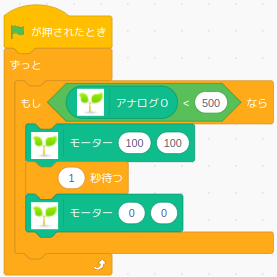
Arduinoで動作するロボット(以下、Arduinoロボ)のプログラムを簡単にするため、Scratchで作ることができるようにします。
Arduinoロボは、NPO法人岡山ロボット技術子供育成協会が講習会で利用しているものと同等です。 このArduinoロボにRaspberryPI4を組み合わせて利用します。
https://orja.org/
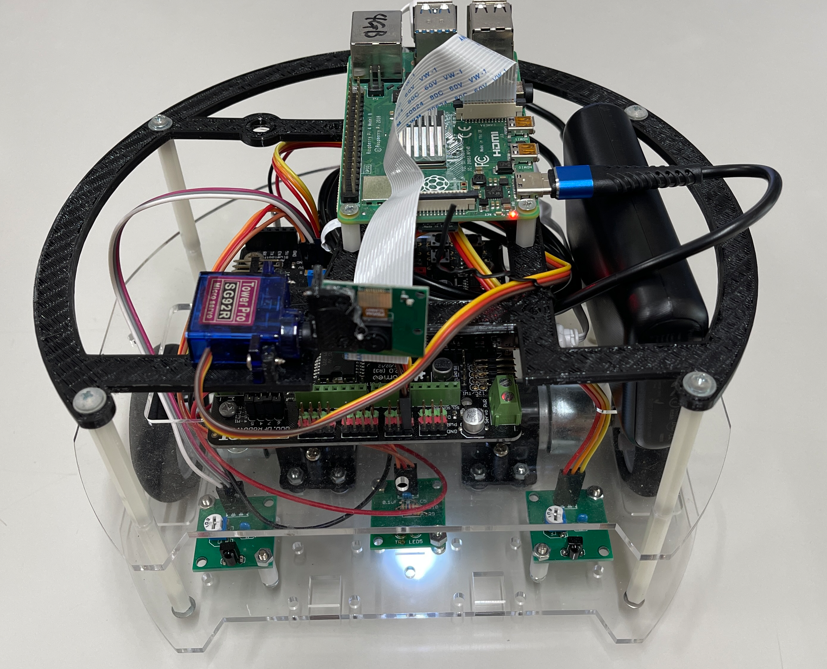


ArduinoロボとRaspberryPI4をUSBケーブルで接続します。
Liteは使えないため、desktopを選択して下さい。
- Raspberry Pi OS with desktop
- Raspberry Pi OS with desktop and recommended software
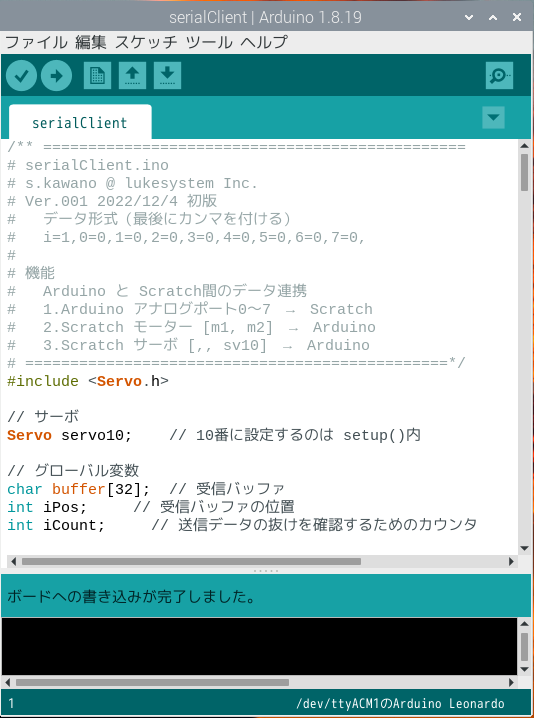
serialClient.ino を書き込みます。
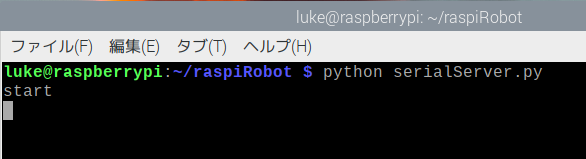
serialServer.py を Python で実行します。
python serialServer.py
start と表示されれば実行中です。
https://lukesys.co.jp/scratchrobot/



他のアナログも同様です。 Arduinoロボのアナログポートに接続されたセンサー値が表示されます。

Arduinoロボの左モーター(m1)が左、右モーター(m2)が右になります。 下記の例だと、左モーターは100、右モーターは200で回します。

※モーターの値は-255~255までです。