
![]()





Why? There didn't really seem to be an easy way to do this IMHO.
This library is able to produce both generation 2 and 3 apriltags all via python ( no C/C++ library compiling and linking).
However, you will need another library (like cv2.aruco) to decode the tags ... see below for more info.
pip install moms_apriltag
See the jupyter notebooks in docs/jupyter folder for how to use this.
This package create a simple numpy image that can then be saved
to a PNG or JPEG image and printed. For circular or custom tags,
there is a toRGBA() function to save the tag to a png using
any image library that can accept numpy array images.
Supported families are shown in the table below in the image and table:
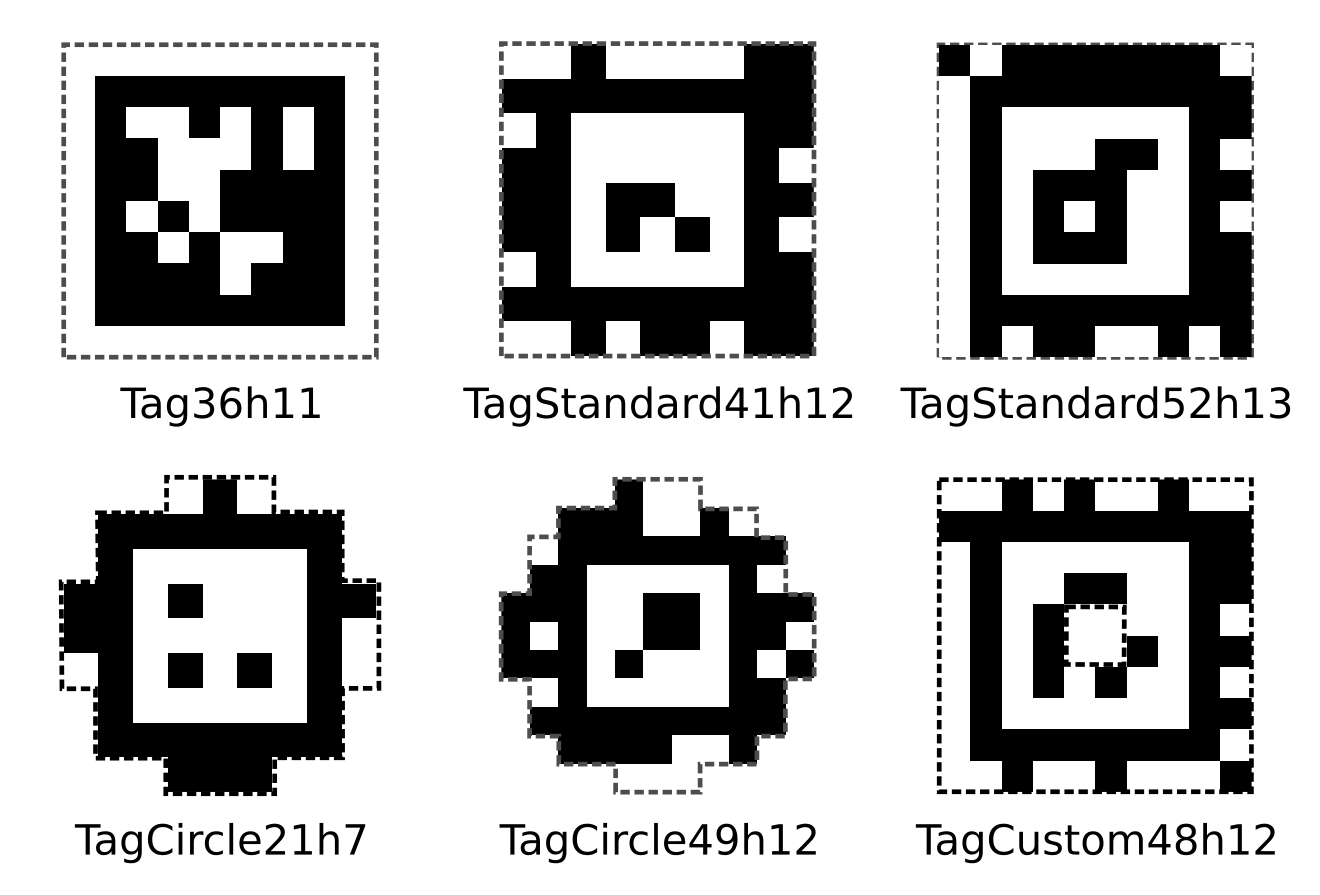
| Family | Generation | Hamming | Size | Data Bits | Unique Tags |
|---|---|---|---|---|---|
tag16h5 |
2 | 5 | 4x4 | 16 | 30 |
tag25h9 |
2 | 9 | 5x5 | 25 | 35 |
tag36h10 |
2 | 10 | 5x5 | 36 | 2,320 |
tag36h11 |
2 | 11 | 5x5 | 36 | 587 |
tagCircle21h7 |
3 | 7 | 9x9 | 36 | 38 |
tagCircle49h12 |
3 | 12 | 11x11 | 49 | 65,535 |
tagCustom48h12 |
3 | 12 | 10x10 | 48 | 42,211 |
tagStandard41h12 |
3 | 12 | 9x9 | 41 | 2,115 |
tagStandard52h13 |
3 | 13 | 10x10 | 52 | 48,714 |
#!/usr/bin/env python3
from moms_apriltag import ApriltagBoard
import imageio
board = ApriltagBoard.create(4,6,"tag25h9", 0.02)
tgt = board.board
filename = "apriltag_target.png"
imageio.imwrite(filename, tgt)# for AprilTag v2
from moms_apriltag import TagGenerator2
from matplotlib import pyplot as plt
tg = TagGenerator2("tag16h5")
tag = tg.generate(4)
plt.imshow(tag, cmap="gray)# for AprilTag v3
from moms_apriltag import TagGenerator3
from matplotlib import pyplot as plt
tg = TagGenerator3("tagStandard41h12")
tag = tg.generate(137)
plt.imshow(tag, cmap="gray)This library uses the builtin cv2.aruco module that can detect:
DICT_APRILTAG_16H5DICT_APRILTAG_25h9DICT_APRILTAG_36h10DICT_APRILTAG_36h11
cv2.aruco for calibration is built in, but it can decode generation 2 tags only.
- pupil labs (tested): https://github.com/pupil-labs/apriltags can decode generation 2 and 3 tags
- WillB97 (untested): https://github.com/WillB97/pyapriltags can decode generation 2 and 3 tags
- change the way the board is created, do a fixed scale size and add a margin with text saying the orientation, family, size, and maybe in the small squares next to the tags, put the number of the tag (number is for the lower left apriltag). I think this would help debugging and understanding what is going on
- insert stereo calibration code using pupil labs?
- move the
opencv_cameracalibration code withapriltagshere - refactor board code
- enable apriltag v3 markers in board
Copyright (c) 2020 Kevin J. Walchko
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.