Udacity的无人驾驶学位作业
相关训练的数据存在了百度云
每个重要项目都有write_up写的项目思路
顺利运行其中的noteboke即可
检测车道线
3CarND-Traffic-Sign-Classifier-Project-master
简单的分类项目及卷积网络可视化 数据在上面的百度云连接
4CarND-Alexnet-Feature-Extraction-master
权重数据在上面的百度云连接
5CarND-Behavioral-Cloning-P3-master
udacity的驾驶模拟器,利用模拟器行车时产生的图片及对应的加速/减速/方向数据,训练一个行为克隆网络来自动驾驶汽车
使用方法见该项目文件内的Readme

6CarND-Camera-Calibration-master
标定相机,去相机畸变(径向畸变、切向畸变)对图像的影响
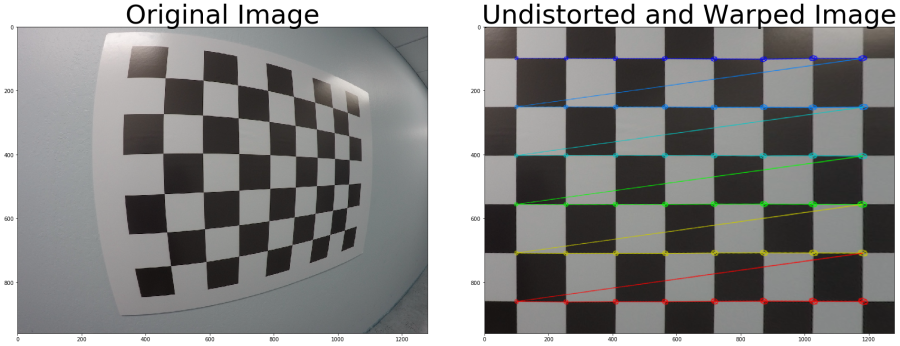
7Advanced-Techniques-for-Lane-Finding
利用颜色空间阈值及sobel算子等检测直线,利用透视变换在垂直视角测量、拟合车道线
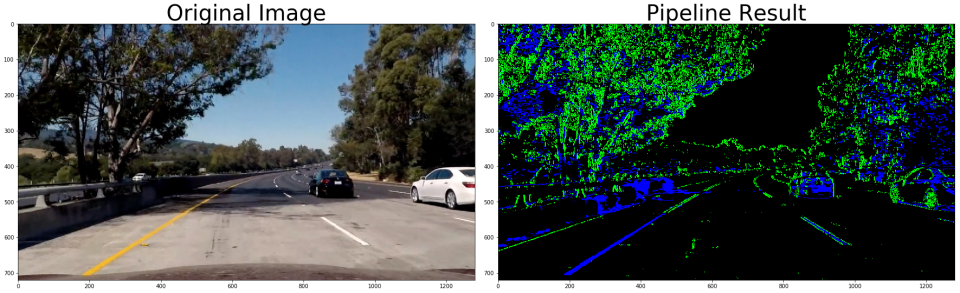
从视频里检测车道线

hog+svm检测视频中的车辆

检测车辆及车道线检测
