Implementation of paper "Estimating Depth from RGB and Sparse Sensing" with pytorch.
- KITTI
The undistort kitti image size is approximately 1242x375,
so one can not obtain crop image with size 480x640 from the original image.
There will be a resize in image and the lidar points can not fill upper part of the image.
- NYUv2
In NYUv2 there are only 1449 clean RGBD image in file nyu_depth_v2_labeled.mat,
but the raw depth in raw data projected to rgb image plane have zeros areas around the border.
After crop using official tool box, the image size should be 561x427.
By the way, the paper says "missing
depth values are filled using Colorization using optimization", which not implemented here.
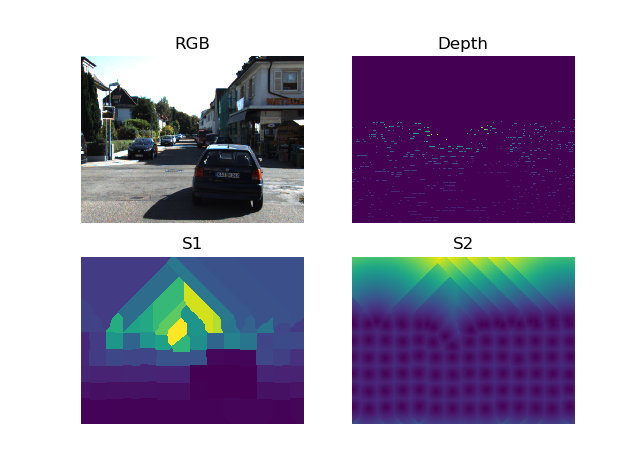
Tested on KITTI image with size 240x320,
It's time consouming with size 480x640 in kitti since the upper half part of depth is all zero.
The depth image nn fill result with downsample rate 48x48 on kitti 480x640 depth image:
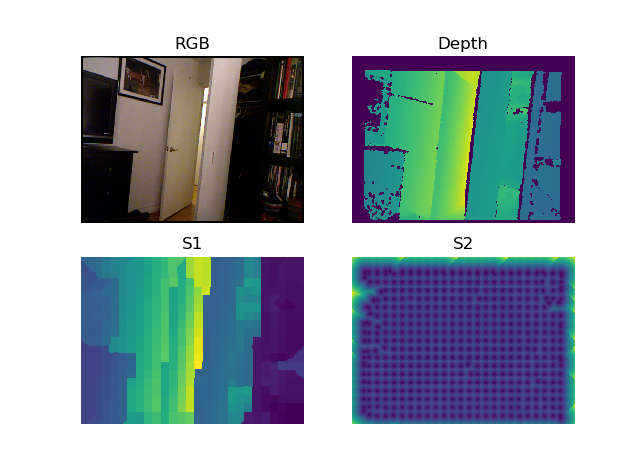
Works fine in NYUv2.
with downsample rate 24x24:
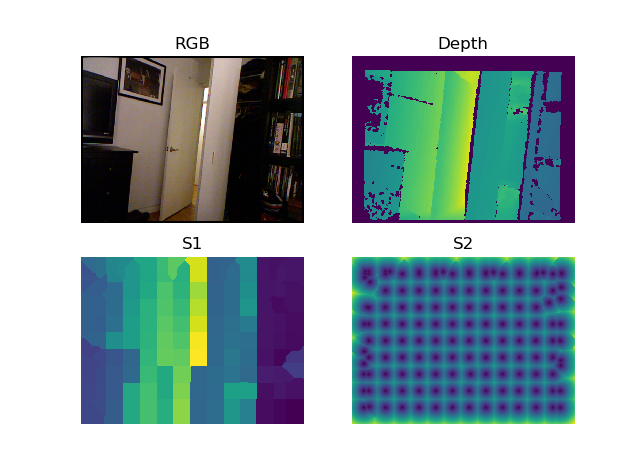
with downsample rate 48x48:
Some block details are not clear enough in the paper, so this implementation can be just a reference. There seems no perdition of hierarchical residual depth output. Moreover, the description of loss function is just one line explanation "We use Adam [15] as our optimizer, and standard pixel-wise L2 loss to train".
Not implemented yet.
TODO: change train loop iteration time from epoches to batches
git clone https://github.com/Shiaoming/DensefromRGBS.git
cd DensefromRGBS
./setup.sh