To run the cnn model, just enter "cnn.py" and run the code. It might take
couple hours to run it if you are using personal computers. Usinga server
or GPU to run this code would significantly lower the running time.
Our project aims to detect motion blur from a single, blurry image. We propose
a deep learning approach to predict the probabilistic distribution of motion blur at
the patch level using a Convolutional Neural Network (CNN).
We approached the problem by slicing 100 images into 30x30 patches, and applied our own motion
blur algorithm to them (with a random rate of 50%). We then labeled the blurry and non-blurry
patches with 0s and 1s (0 for still, 1 for blurry), and loaded the modified images in as our training
data.
1.1 Generating the training data
We generated the training data using images from thePascal Visual Object Classes Challenge 2010 (VOC2010)data set. Our work was done in Python using thePIL,numpy,opency, andoslibraries.
Once we had the original images fromPascal, we had to modify them to fit our needs. We needed to
have 100 images, each partially blurred and with a corresponding matrix indicating which part of the
image is blurred.
We achieved this by:
- Making a blurred copy of the original image.
- Cutting both images (original and blurry) into 30 × 30 patches.
- Creating a 2D List in Python of size 30 × 30 , to represent each image patch We initialize each element to 0 (to represent non-blurry).
- Picking half the patches from the list and marking them as 1 (to represent blurry).
- Putting the final image together to get a partially-blurred, qualifying image (and its corre- sponding matrix).
- Saving the image as "n.jpg" (where n is the serial number of the image), and adding the matrix to a list (to form a 3D ’list of lists’) containing the matrices of all the image.
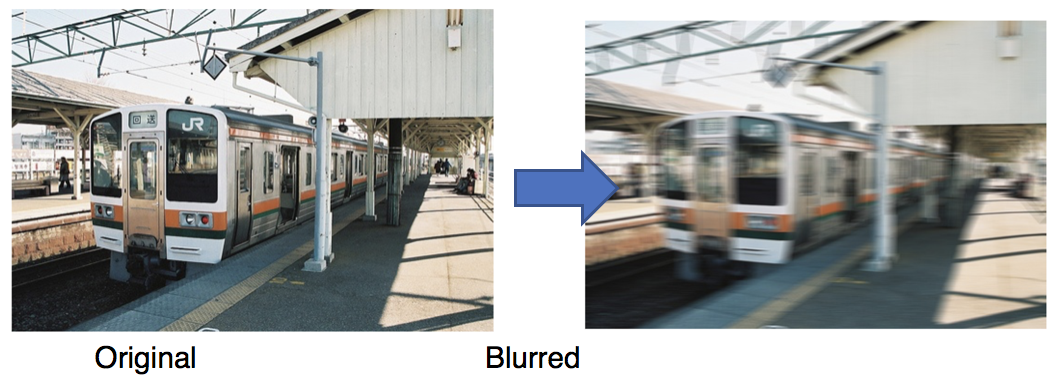
Image of the original-to-blur process.

Image of the image splitting process.

The final image with its corresponding matrix.
We repeat the above for all 100 images, until we end up with a folder containing partially-blurred images"0.jpg"through"100.jpg", and a 3D list (named"labels") that contains 100 matrices. This lets us access the matrix for image"31.jpg", for example, by querying for"labels[31]".
Once we had the prepared images,we loaded them into our training set.We ran into a prob- lem loading the images into anumpyarray, where our images were of the form (30,30,3), while theKeras.Conv2Dlayer required input to be of the form (3,30,30). We solved this by using the numpy.swapexes()function to alter the images’ shape in order to fit the convolutional layer.
We then apply the CNN learning model. First, we apply a Convolution2D layer with 7 × 7 filters, followed by aReLUfunction. TheConvlayer’s parameters consiste of a set of learnable filters. Each filter is small spatially, but extends through the depth of the input volume.
During the forward pass, we slide each filter across the width and height of the input volume and compute the dot products between the entries of the filter and the input at any position.ReLUis the rectifier function- an activation function that can be used by neurons, just like any other activation function. A node using the rectifier activation function is called aReLU node.ReLUsets all negative values in the matrix x to 0, and all other values are kept constant. ReLU us computed after the convolution, and thus a nonlinear activation function (liketanhorsigmoid).
After that,we add aMaxPooling2Dlayerwith a pool size of 2 × 2. MaxPooling is a sample- based discretization process. The objective is to down-sample an input representation, reducing its dimensionality and allowing for assumptions to be made about features contained in the binned sub-regions.
We thenadd aDropoutlayerwith dropout rate of 0.2, which makes our learning process faster. Dropout randomly ignoring nodes is useful in CNN models because it prevents interdependencies from emerging between nodes. This allows the network to learn more and form a more robust relationship. We then do the’Conv2D, ReLU, MaxPooling2D, Dropout’circle again. Finally, we add a fully-connected layer withReLU, and thensoftmaxthe result.Softmaxis a classifier at the end of the neural network — a logistic regression to regularize outputs to a value between 0 and 1.
We set our model’s learning rate to be 0. 01. This might generally be too big, but we made this decision for the sake of brevity - it was the fastest way to show a result. We chose a batch size of 126 (because we had large training data). We also choseAdamas our optimizer as it’s the most efficient optimizer for our model.
After training with 100 epochs,we had testing accuracy of 92%, which is a very optimal rate for our model. Our training model is saved in an HDF5 file,"motionblur.h5".

In this report, we have proposed a novel CNN-based motion blur detection apporach. We learn an effective CNN for estimating motion blur from local patches. In the future, we are interested in designing a CNN for eastimating motion kernels. We are also interested in design a CNN non-uniform motion deblurring method.
This report has been prepared for the Boston University Machine Learning course (CS 542), taken over the Summer 2, 2017 semester by the listed authors. It is intended to be used in compliance of the requirements of the course.
[1] Jian Sun, Wenfei Cao, Zongben Xu, Jean Ponce. Learning a convolutional neural network for non-uniform motion blur removal. CVPR 2015 - IEEE Conference on Computer Vision and Pattern Recognition 2015, Jun 2015, Boston, United States. IEEE, 2015,.
[2] “Visual Object Classes Challenge 2010 (VOC2010).” The PASCAL Visual Object Classes Challenge 2010 (VOC2010), PASCAL, 2010, host.robots.ox.ac.uk/pascal/VOC/voc2010/.