forked from navit-gps/navit
-
Notifications
You must be signed in to change notification settings - Fork 0
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
1 parent
81714d7
commit eb93575
Showing
1 changed file
with
2 additions
and
89 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,90 +1,3 @@ | ||
| [](https://circleci.com/gh/navit-gps/navit) | ||
|
|
||
| Navit on Android tablet: | ||
|
|
||
| 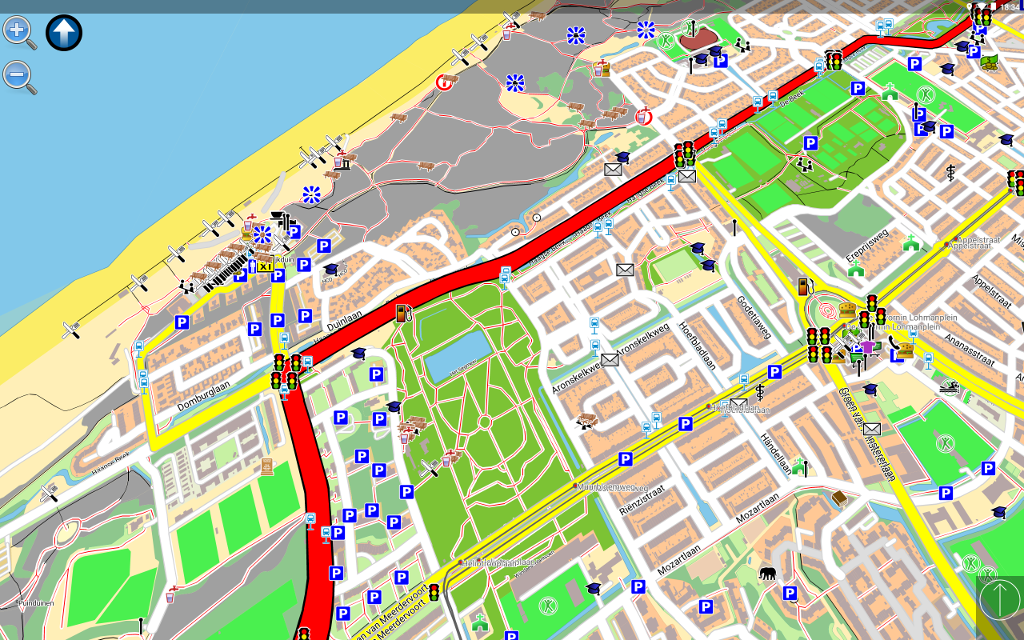 | ||
|
|
||
| Navit on Linux based Carputer: | ||
|
|
||
|  | ||
|
|
||
| <p> | ||
| <a href="https://play.google.com/store/apps/details?id=org.navitproject.navit"><img src="http://switzerland.tasis.com/uploaded/images2/appstore_button_google.png" height="100"/></a> | ||
|
|
||
| <a href="https://f-droid.org/repository/browse/?fdfilter=navit&fdid=org.navitproject.navit"><img src="https://upload.wikimedia.org/wikipedia/commons/thumb/0/0d/Get_it_on_F-Droid.svg/200px-Get_it_on_F-Droid.svg.png" height="100"/></a> | ||
| </p> | ||
|
|
||
| NavIT | ||
| ===== | ||
|
|
||
| Navit is a open source (GPL) car navigation system with routing engine. | ||
|
|
||
| It's modular design is capable of using vector maps of various formats | ||
| for routing and rendering of the displayed map. It's even possible to | ||
| use multiple maps at a time. | ||
|
|
||
| The GTK+ or SDL user interfaces are designed to work well with touch | ||
| screen displays. Points of Interest of various formats are displayed | ||
| on the map. | ||
|
|
||
| The current vehicle position is either read from gpsd or directly from | ||
| NMEA GPS sensors. | ||
|
|
||
| The routing engine not only calculates an optimal route to your | ||
| destination, but also generates directions and even speaks to you. | ||
|
|
||
| Navit currently speaks over 70 languages! | ||
|
|
||
| You can help translating via our web based translation page : | ||
| http://translations.launchpad.net/navit/trunk/+pots/navit | ||
|
|
||
|
|
||
| For help or more information, please refer to the wiki : | ||
| http://wiki.navit-project.org | ||
|
|
||
| If you don't know where to start, we recommend you to read the | ||
| Interactive Help : http://wiki.navit-project.org/index.php/Interactive_help | ||
|
|
||
|
|
||
| Maps: | ||
| ===== | ||
|
|
||
| The best navigation system is useless without maps. Those three maps | ||
| are known to work: | ||
|
|
||
| - OpenStreetMaps : display, routing, but street name search isn't complete | ||
| (see http://wiki.navit-project.org/index.php/OpenStreetMaps ) | ||
|
|
||
| - Grosser Reiseplaner and compliant maps : full support | ||
| (see http://wiki.navit-project.org/index.php/European_maps ) | ||
|
|
||
| - Garmin maps : display, routing, search is being worked on | ||
| (see http://wiki.navit-project.org/index.php/Garmin_maps ) | ||
|
|
||
|
|
||
| GPS Support: | ||
| ============ | ||
|
|
||
| Navit read the current vehicle position : | ||
| - directly from a file | ||
| - from gpsd (local or remote) | ||
| - from udp server (friends tracking) (experimental) | ||
|
|
||
|
|
||
| Routing algorithm | ||
| ================= | ||
|
|
||
| NavIt uses a Dijkstra algorithm for routing. The routing starts at the | ||
| destination by assigning a value to each point directly connected to | ||
| destination point. The value represents the estimated time needed to | ||
| pass this distance. | ||
|
|
||
| Now the point with the lowest value is choosen using the Fibonacci | ||
| heap and a value is assigned to connected points whos are | ||
| unevaluated or whos current value ist greater than the new one. | ||
|
|
||
| The search is repeated until the origin is found. | ||
|
|
||
| Once the origin is reached, all that needs to be done is to follow the | ||
| points with the lowest values to the destination. | ||
| # Speedsaver software # | ||
|
|
||
| This is the core Speedsaver code. Derived from Navit, the open source satnav software. Thanks to the Navit team for their great work over the years. |