How to control an Ultrasonic Sensor from a Raspberry Pi using Windows 10 IOT core.
An ultrasonic sensor, is a sensor that uses sound waves to determine the distance to an object.
A micro computer sends a electric pulse to ultrasonic sensor via a GPIO Pin. The ultra sonic sensor intern sends out a sound wave. The sound wave bounces off an object and returns to the sensor. The ultra sonic sensor sends a pulse back to the listening GPIO pin of the micro computer, a raspberry pi for this example.
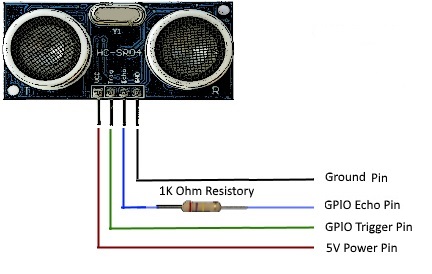
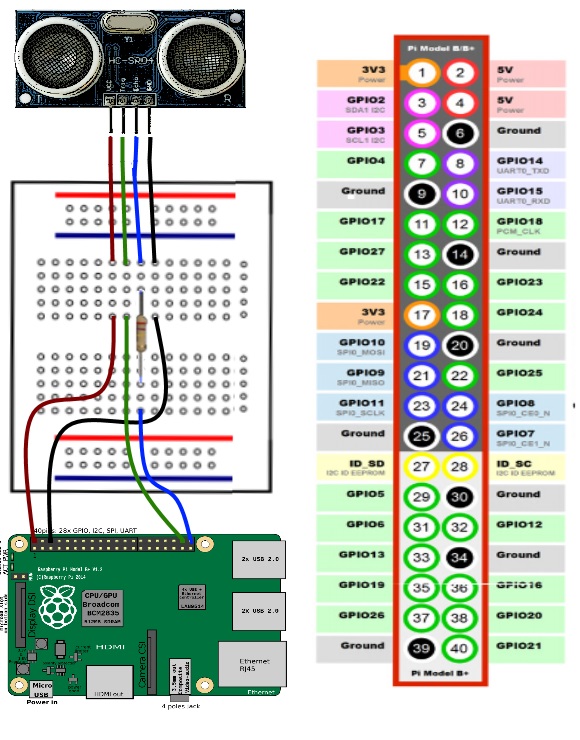
To wire the ultrasonic sensor to the raspberry pi, 4 GPIO pins are required: a Ground, a 5 volt power pin, and two 3 volt pins. A GPIO pin for the raspberry pi can only have 3.3 volts applied to any of it's GPIO pins and the ultrasonic has the capabilty to send 5 volts from the echo pin back to the GPIO Pin of the pi. To avoid the ultrasonic sensor from sending too much voltage to the GPIO pin of the raspberry pi, a 1 K Ohm resistor is inserted, to bring the voltage down to the correct level.
- The five volt power Pin of the raspberry pi connects to the VCC pin of the ultrasonic sensor (pin 2)
- The Gound Pin of the raspberry pi connects to the GND pin of the ultrasonic sensor (pin 6)
- The GPIO Pin 20 of the raspberry pi connects to the Trigger Pin of the ultrasonic sensor (pin 38)
- The GPIO Pin 21 of the raspberry pii connects to the Echo Pin of the ultrasonic sensor (pin 40)
Sound moves at 1,088 feet per second (332 meters per second). Different air temperatures change the speed of sound but for this article, we will assume sound moves at a constant speed, no matter what the air temperature nor humidity is.
To use a sound wave to determine distance to an object, the sound speed travels will need to be cut in half. The reason for this is one needs to not only consider the time for the sound wave to travel to the object but also to include the time required for the sound wave to return to the sensor. For this measurement, we will consider that sound travels at 170 meters per second.
In one second, a sound wave will travel from the ultra sonic sensor to an object 170 meters away and back again. If we wanted to know the amount of time sound travels to an object and back in inches rather than meters, we can apply some simple algebra to determine the formula....
TimeinSeconds * 17000 / 2.5 equals the amount of distance sound travels in inches in one second rather than meters.
Click on the image to watch the video
The Ultra sonic Sensor is controlled through the UltraSonicSensor class, below is the source code for this class.
class UltraSonicSensor
{
private GpioPin triggerPin { get; set; }
private GpioPin echoPin { get; set; }
private Stopwatch timeWatcher;
public UltraSonicSensor(int triggerPin, int echoPin)
{
GpioController controller = GpioController.GetDefault();
timeWatcher = new Stopwatch();
//initialize trigger pin.
this.triggerPin = controller.OpenPin(triggerPin);
this.triggerPin.SetDriveMode(GpioPinDriveMode.Output);
this.triggerPin.Write(GpioPinValue.Low);
//initialize echo pin.
this.echoPin = controller.OpenPin(echoPin);
this.echoPin.SetDriveMode(GpioPinDriveMode.Input);
}
private double GetDistance()
{
ManualResetEvent mre = new ManualResetEvent(false);
mre.WaitOne(100);
Stopwatch pulseLength = new Stopwatch();
Stopwatch TotalTime = new Stopwatch();
TotalTime.Start();
//Send pulse
this.triggerPin.Write(GpioPinValue.High);
mre.WaitOne(TimeSpan.FromMilliseconds(0.01));
this.triggerPin.Write(GpioPinValue.Low);
//Recieve pusle
while (this.echoPin.Read() == GpioPinValue.Low && TotalTime.ElapsedMilliseconds < 5000)
{
}
pulseLength.Start();
while (this.echoPin.Read() == GpioPinValue.High && TotalTime.ElapsedMilliseconds < 5000)
{
}
pulseLength.Stop();
if (TotalTime.ElapsedMilliseconds >= 5000)
return -1;
//Calculating distance
TimeSpan timeBetween = pulseLength.Elapsed;
//Debug.WriteLine(timeBetween.ToString());
return timeBetween.TotalSeconds;
}
public double GetDistanceInCentimeters => GetDistance() * 17000;
public double GetDistanceInInches => GetDistance() * 17000 / 2.5;
private double PulseIn(GpioPin echoPin, GpioPinValue value)
{
var t = Task.Run(() =>
{
//Recieve pusle
while (this.echoPin.Read() != value)
{
}
timeWatcher.Start();
while (this.echoPin.Read() == value)
{
}
timeWatcher.Stop();
//Calculating distance
double distance = timeWatcher.Elapsed.TotalSeconds * 17000;
return distance;
});
bool didComplete = t.Wait(5000);
if (didComplete)
{
return t.Result;
}
else
{
return 0.0;
}
}
}