{kind=link}
{kind=link}
lane detection for autonomous driving car using haugh transforms
example of 1 frame from current output video:
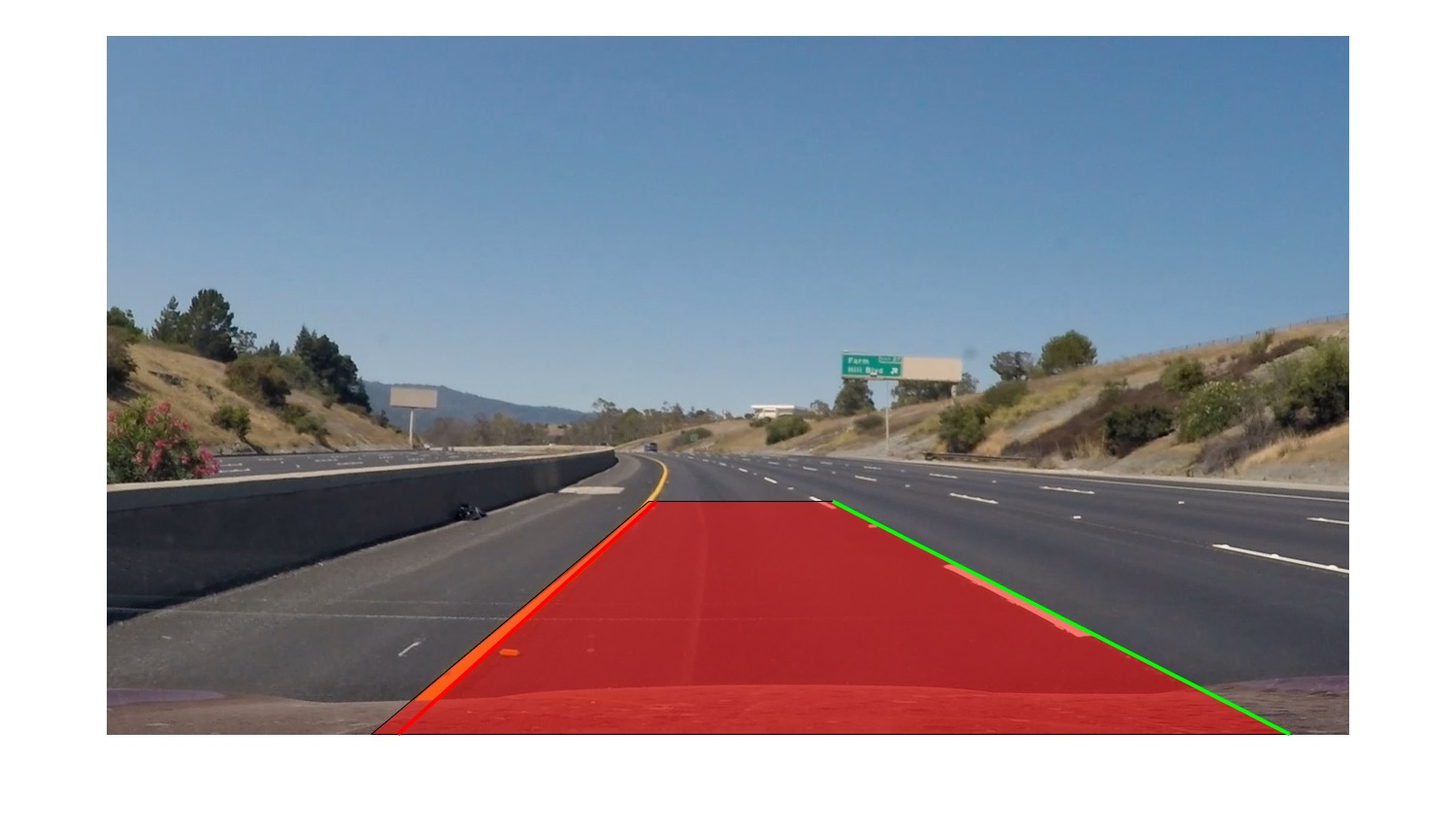
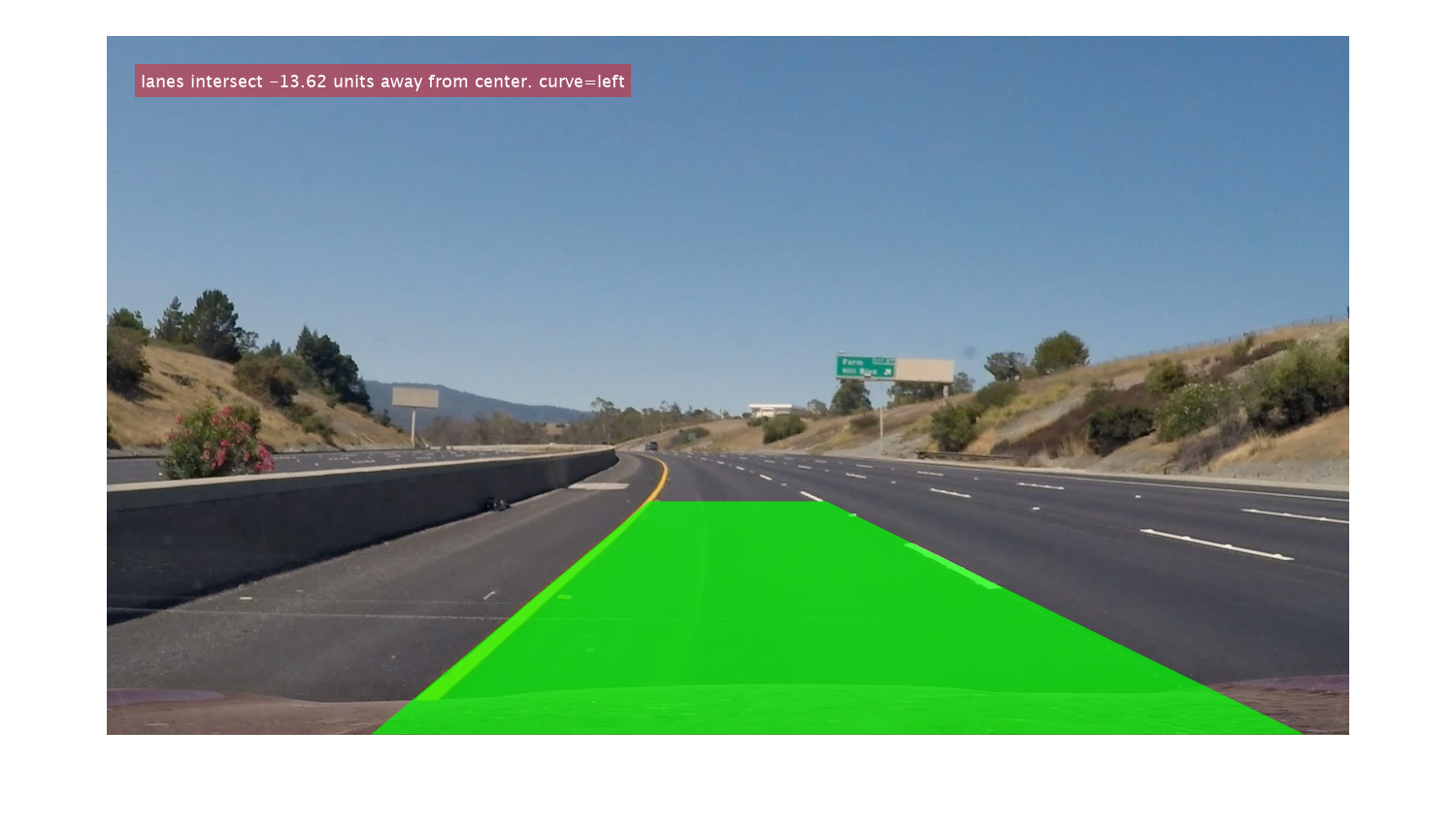
curves are detected by measuring the distance between the intersection point of left and right lanes and the center of the screen (horizontal center)
RGB stops working well when the lighting on the road changes. (shadow from trees, lighter asphalt, more sunlight, etc...)
HSV keeps the color values and luminance more seperate than RGB. the same image outdoor and indoor for example will have very similar saturation and value. only the hue will be different.
for each frame:
- convert frame to hsv
- remove top half of image + above diagonals
- binarize image by only keeping yellow and whitle pixels.
- detect edges in image
- find haugh transform
- find haugh peaks (lines in image)
- add shape of the trapazoid created by lines to origianl image