Authors: [Yuki Saito], [Ryo Hachiuma], [Hideo Saito]
This is a repository of Paper: "In-Plane Rotation-Aware Monocular Depth Estimation using SLAM", "Training-free Approach to Improve the Accuracy of Monocular Depth Estimation with In-Plane Rotation"".
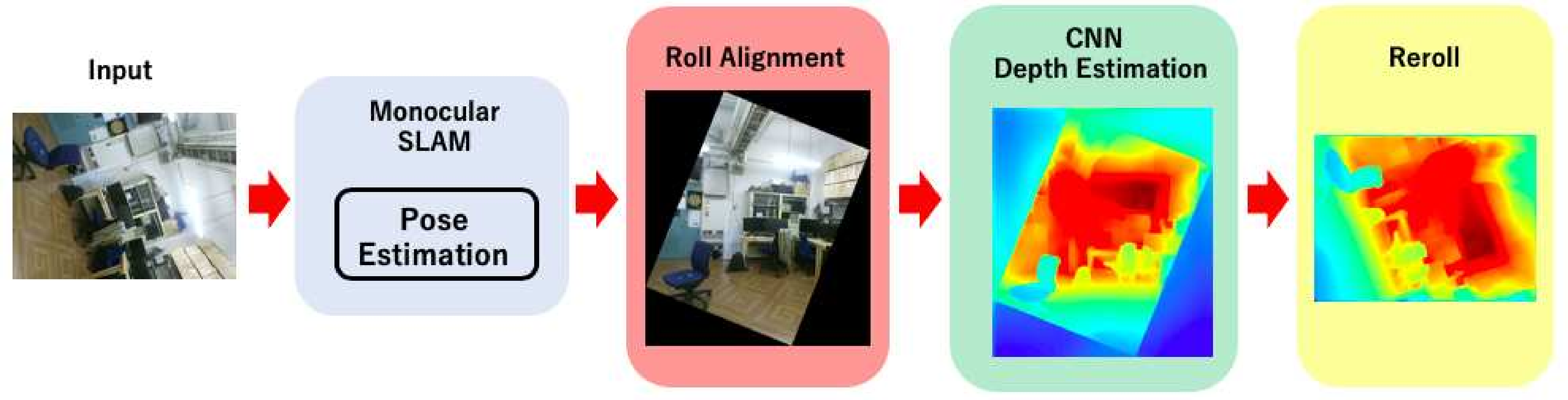
This script is composed of ORB-SLAM2 part, DepthEstimation part, and DenseReconstruction part.
[Our Paper1] Yuki Saito, Ryo Hachiuma, and Hideo Saito. In-Plane Rotation-Aware Monocular Depth Estimation using SLAM. International Workshop on Frontiers of Computer Vision(IW-FCV 2020), pp. 305-317, 2020. pdf.
[Our Paper2] Yuki Saito, Ryo Hachiuma, Masahiro Yamaguchi, and Hideo Saito, Training-free Approach to Improve the Accuracy of Monocular Depth Estimation with In-Plane Rotation. IEICE Transactions on Information and Systems, 2021. pdf
[Our paper3] 齋藤祐貴,八馬遼,山口真弘,斎藤英雄,SLAMを用いたRoll方向回転に頑健な単眼depth推定の精度改善手法,第222回コンピュータビジョンとイメージメディア研究会,2020年5月15日発表済. [優秀賞] ** pdf**
If you use our scripts in an academic work, please cite:
@article{In-PlaneRotationAwareMonoDepth2020,
title={In-Plane Rotation-Aware Monocular Depth Estimation Using SLAM},
author={Yuki Saito, Ryo Hachiuna, and Hideo Saito},
journal={International Conference on Frontiers of Computer Vision},
pages={305--317},
publisher={Springer Singapore},
year={2020}
}
if you use ORB-SLAM2 (Stereo or RGB-D) in an academic work, please cite:
@article{murORB2,
title={{ORB-SLAM2}: an Open-Source {SLAM} System for Monocular, Stereo and {RGB-D} Cameras},
author={Mur-Artal, Ra\'ul and Tard\'os, Juan D.},
journal={IEEE Transactions on Robotics},
volume={33},
number={5},
pages={1255--1262},
doi = {10.1109/TRO.2017.2705103},
year={2017}
}
if you use DenseReconstruction Module in an academic work, please cite:
@INPROCEEDINGS{WhangCNNMonoFusion,
author={Wang, Jiafang and Liu, Haiwei and Cong, Lin and Xiahou, Zuoxin and Wang, Liming},
booktitle={2018 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct)},
title={CNN-MonoFusion: Online Monocular Dense Reconstruction Using Learned Depth from Single View},
year={2018},
volume={},
number={},
pages={57--62},
doi={10.1109/ISMAR-Adjunct.2018.00034}
}
We have tested the library in **Ubuntu 18.04 and 16.04, but it should be easy to compile in other platforms. A powerful computer (e.g. i7) will ensure real-time performance and provide more stable and accurate results.
For other related libaries, please search in official page of ORB-SLAM2 Git
-
Download a sequence from http://vision.in.tum.de/data/datasets/rgbd-dataset/download and uncompress it.
-
Associate RGB images and depth images using the python script associate.py. We already provide associations for some of the sequences in Examples/RGB-D/associations/. You can generate your own associations file executing:
python associate.py PATH_TO_SEQUENCE/rgb.txt PATH_TO_SEQUENCE/depth.txt > associations.txt
- Execute the following command. Change
XXX.yamlto TUMX.yaml, or OurDataset.yaml for each sequence respectively. ChangePATH_TO_SEQUENCE_FOLDERto the uncompressed sequence folder.
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txt Examples/RGB-D/XXX.yaml PATH_TO_SEQUENCE_FOLDER ASSOCIATIONS_FILE
- Execute the following command. Change
XXXXX.yamlto TUM1.yaml, or OurDataset.yaml for each sequence respectively. ALl yaml files are summarized in Examples/rgbd_monodepth folder. ChangePATH_TO_SEQUENCE_FOLDERto the uncompressed sequence folder.
./Examples/rgbd_monodepth/rgbd_monodepth Vocabulary/ORBvoc.txt Examples/Monocular/XXX.yaml PATH_TO_SEQUENCE_FOLDER ASSOCIATIONS_FILE