This repo contains the code and data of our ICCV'2023 paper. Our work has also been included by famous graph matching open-source projects ThinkMatch

Yijie Lin, Mouxing Yang, Jun Yu, Peng Hu, Changqing Zhang, Xi Peng. Graph Matching with Bi-level Noisy Correspondence. ICCV, 2023. [paper]
Graph Matching (GM) is a fundamental yet challenging problem in computer vision, pattern recognition and data mining. GM aims to find node-to-node correspondence among multiple graphs, by solving an NP-hard combinatorial problem named Quadratic Assignment Problem (QAP).
Graph matching techniques have been applied to the following applications:
-
-
-
and more...
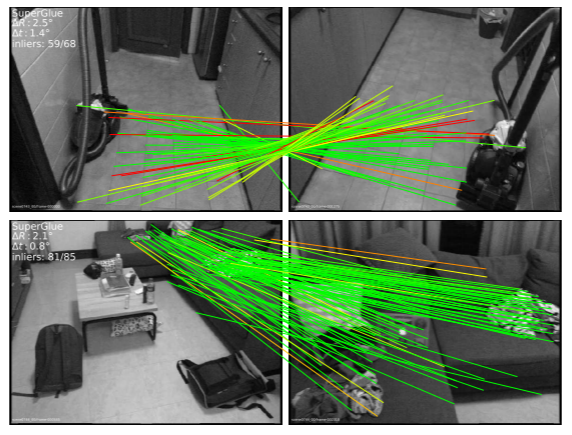
In this paper, we introduce a novel and widely existing problem in graph matching (GM) and focus on the scenario of visual image keypoint matching. As shown below, the inaccurate annotations will inevitably lead to Bi-level Noisy Correspondence (BNC) problem. Due to the poor recognizability and viewpoint differences between images, it is inevitable to inaccurately annotate some keypoints with offset and confusion, leading to the mismatch between two associated nodes (NNC). The noisy node-to-node correspondence will further contaminate the edge-to-edge correspondence (ENC).

Some of the module needs C++ supporting and we highly encouraged to directly use the docker environment. Get the recommended docker image by
docker pull runzhongwang/thinkmatch:torch1.10.0-cuda11.3-cudnn8-pyg2.0.3-pygmtools0.3.8
docker run --gpus all --name thinkmatch -p 10000:22 -it runzhongwang/thinkmatch:torch1.10.0-cuda11.3-cudnn8-pyg2.0.3-pygmtools0.3.8
pip install ortools==9.4.1874Note we train our model on a single 3090 GPU. The training time is about 9 hours for Pascal VOC and 4 hours for Spair71k.
The below python environment is provided by ThinkMatch and we do not guarantee the integrity.
-
Install and configure Pytorch 1.6 (with GPU support).
-
Install ninja-build:
apt-get install ninja-build -
Install python packages:
pip install tensorboardX scipy easydict pyyaml xlrd xlwt pynvml pygmtools
-
Install building tools for LPMP:
apt-get install -y findutils libhdf5-serial-dev git wget libssl-dev wget https://github.com/Kitware/CMake/releases/download/v3.19.1/cmake-3.19.1.tar.gz && tar zxvf cmake-3.19.1.tar.gz cd cmake-3.19.1 && ./bootstrap && make && make install
-
Install and build LPMP:
python -m pip install git+https://git@github.com/rogerwwww/lpmp.git
You may need
gcc-9to successfully build LPMP. Here we provide an example installing and configuringgcc-9:apt-get update apt-get install -y software-properties-common add-apt-repository ppa:ubuntu-toolchain-r/test apt-get install -y gcc-9 g++-9 update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-9 60 --slave /usr/bin/g++ g++ /usr/bin/g++-9
-
Install torch-geometric:
export CUDA=cu101 export TORCH=1.6.0 /opt/conda/bin/pip install torch-scatter==2.0.5 -f https://pytorch-geometric.com/whl/torch-${TORCH}+${CUDA}.html /opt/conda/bin/pip install torch-sparse==0.6.8 -f https://pytorch-geometric.com/whl/torch-${TORCH}+${CUDA}.html /opt/conda/bin/pip install torch-cluster==1.5.8 -f https://pytorch-geometric.com/whl/torch-${TORCH}+${CUDA}.html /opt/conda/bin/pip install torch-spline-conv==1.2.0 -f https://pytorch-geometric.com/whl/torch-${TORCH}+${CUDA}.html /opt/conda/bin/pip install torch-geometric==1.6.3
-
If you have configured
gcc-9to build LPMP, be sure to switch back togcc-7because this code repository is based ongcc-7. Here is also an example:update-alternatives --remove gcc /usr/bin/gcc-9 update-alternatives --install /usr/bin/gcc gcc /usr/bin/gcc-7 60 --slave /usr/bin/g++ g++ /usr/bin/g++-7
Note: All following datasets can be automatically downloaded and unzipped by pygmtools in this code, but we recommend downloading the dataset yourself as it is much faster.
-
PascalVOC-Keypoint
-
Download VOC2011 dataset and make sure it looks like
data/PascalVOC/TrainVal/VOCdevkit/VOC2011 -
Download keypoint annotation for VOC2011 from Berkeley server or google drive and make sure it looks like
data/PascalVOC/annotations -
The train/test split is available in
data/PascalVOC/voc2011_pairs.npz. This file must be added manually.
Please cite the following papers if you use PascalVOC-Keypoint dataset:
@article{EveringhamIJCV10, title={The pascal visual object classes (voc) challenge}, author={Everingham, Mark and Van Gool, Luc and Williams, Christopher KI and Winn, John and Zisserman, Andrew}, journal={International Journal of Computer Vision}, volume={88}, pages={303–338}, year={2010} } @inproceedings{BourdevICCV09, title={Poselets: Body part detectors trained using 3d human pose annotations}, author={Bourdev, L. and Malik, J.}, booktitle={International Conference on Computer Vision}, pages={1365--1372}, year={2009}, organization={IEEE} } -
-
Willow-Object-Class
-
Download Willow-ObjectClass dataset
-
Unzip the dataset and make sure it looks like
data/WillowObject/WILLOW-ObjectClass
Please cite the following paper if you use Willow-Object-Class dataset:
@inproceedings{ChoICCV13, author={Cho, Minsu and Alahari, Karteek and Ponce, Jean}, title = {Learning Graphs to Match}, booktitle = {International Conference on Computer Vision}, pages={25--32}, year={2013} } -
-
SPair-71k
-
Download SPair-71k dataset
-
Unzip the dataset and make sure it looks like
data/SPair-71k
Please cite the following papers if you use SPair-71k dataset:
@article{min2019spair, title={SPair-71k: A Large-scale Benchmark for Semantic Correspondence}, author={Juhong Min and Jongmin Lee and Jean Ponce and Minsu Cho}, journal={arXiv prepreint arXiv:1908.10543}, year={2019} } @InProceedings{min2019hyperpixel, title={Hyperpixel Flow: Semantic Correspondence with Multi-layer Neural Features}, author={Juhong Min and Jongmin Lee and Jean Ponce and Minsu Cho}, booktitle={ICCV}, year={2019} } -
For more information, please see pygmtools.
Run training and evaluation
python train_eval.py --cfg path/to/your/yamland replace path/to/your/yaml by path to your configuration file, e.g.
python train_eval.py --cfg experiments/vgg16_common_willow.yamlDefault configuration files are stored inexperiments/ and you are welcomed to try your own configurations.
├── experiments
│ the hyperparameter setting of experiments
├── models
│ └── COMMON
│ the module and training pipeline of COMMON
│ ├── model.py
│ │ the implementation of training/evaluation procedures of COMMON
│ ├── model_config.py
│ │ the declaration of model hyperparameters
│ └── sconv_archs.py
│ the implementation of spline convolution (SpilneCNN) operations, the same with BBGM
├── src
│ the source code of the Graph Matching, from ThinkMatch
│ └── loss_func.py
│ the implementation of loss functions
├── eval.py
| evlaution script
└── train_eval.py
training script
We provides pretrained models. The model weights are available via google drive
To use the pretrained models, firstly download the weight files, then add the following line to your yaml file:
PRETRAINED_PATH: path/to/your/pretrained/weightsFor benchmark results, please refer to https://paperswithcode.com/task/graph-matching and ThinkMatch.
| model | year | aero | bike | bird | boat | bottle | bus | car | cat | chair | cow | table | dog | horse | mbkie | person | plant | sheep | sofa | train | tv | mean |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| COMMON | 2023 | 0.6560 | 0.7520 | 0.8080 | 0.7950 | 0.8930 | 0.9230 | 0.9010 | 0.8180 | 0.6160 | 0.8070 | 0.9500 | 0.8200 | 0.8160 | 0.7950 | 0.6660 | 0.9890 | 0.7890 | 0.8090 | 0.9930 | 0.9380 | 0.8270 |
| model | year | remark | Car | Duck | Face | Motorbike | Winebottle | mean |
|---|---|---|---|---|---|---|---|---|
| COMMON | 2023 | - | 0.9760 | 0.9820 | 1.0000 | 1.0000 | 0.9960 | 0.9910 |
| model | year | aero | bike | bird | boat | bottle | bus | car | cat | chair | cow | dog | horse | mtbike | person | plant | sheep | train | tv | mean |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| COMMON | 2023 | 0.7730 | 0.6820 | 0.9200 | 0.7950 | 0.7040 | 0.9750 | 0.9160 | 0.8250 | 0.7220 | 0.8800 | 0.8000 | 0.7410 | 0.8340 | 0.8280 | 0.9990 | 0.8440 | 0.9820 | 0.9980 | 0.8450 |
Please cite the following paper if you use this model in your research:
@inproceedings{lin2023graph,
title={Graph Matching with Bi-level Noisy Correspondence},
author={Lin, Yijie and Yang, Mouxing and Yu, Jun and Hu, Peng and Zhang, Changqing and Peng, Xi},
booktitle={Proceedings of the IEEE/CVF international conference on computer vision},
year={2023}
}
This repo is built upon the framework of ThinkMatch and the network structure of BBGM, thanks for their excellent work!