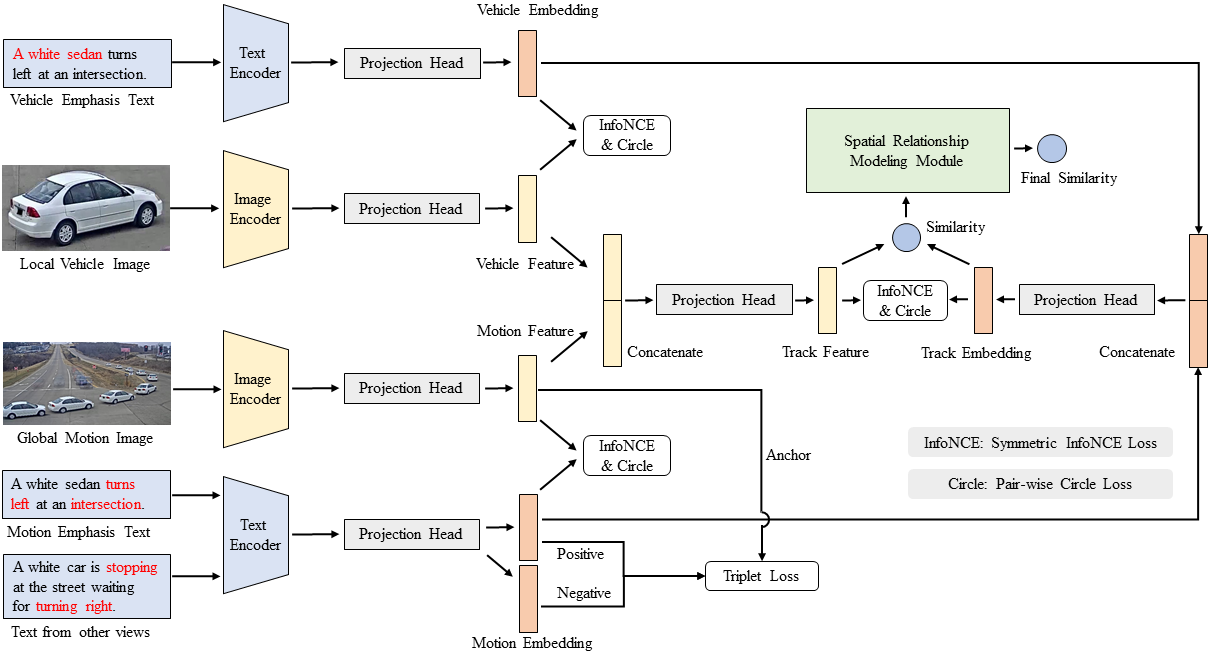
🏆 The 1st Place Solution for CVPR AI City 2022 Challenge Track2: Natural Language-Based Vehicle Retrieval
[official results] [paper] [slides] [arxiv]
We have two codebases and get the final results with these two:
- One is this repo: https://github.com/ZhaoChuyang/AIC22-Track2-SMM
- Another is at here: https://github.com/hbchen121/AICITY2022_Track2_SSM
Preprocess the dataset to prepare frames, motion maps, NLP augmentation
-
Run
python3 scripts/extract_vdo_frms.pyto extract frames from dataset. -
Run
python3 scripts/deal_nlpaug.pyto perform NLP subject augmentation.
Generate post-processing features
-
Run
python3 scripts/get_location_info.pyto generate location information for each camera, which will be used in our post-processing stage. -
Run
python3 scripts/get_relation_info.pyto generate relationship features for test tracks, which will be used in our post-processing stage.
Train model using the following configuration configs/two_branch_cam_loc_dir.yaml:
python -u main.py \
--name tb_cam_loc_dir \
--config configs/two_branch_cam_loc_dir.yaml
Run python test.py --config configs/two_branch_cam_loc_dir.yaml --save-name "tb_model" to get test features.
Run scripts/get_sumbmit.py to get submitted file, post-processing is added by default.
If you have any questions, please leave an issue or contact us: cy.zhao15@gmail.com or hbchen121@gmail.com.