The code in the repo should run as-is out of the box but how the parameters of the simulation can be manipulated are covered below.
Read my related blog post here.
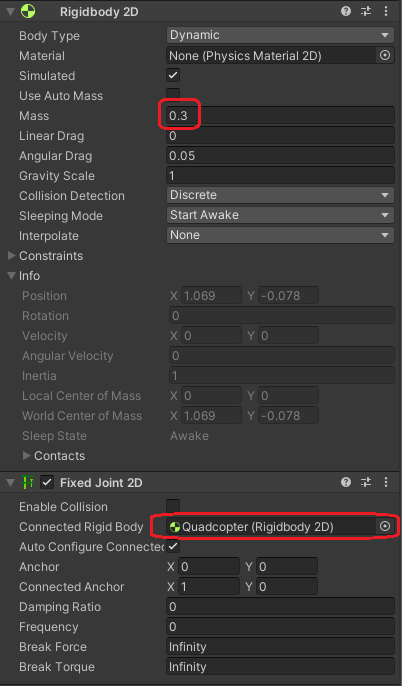
The drone has left and right thrusters, these can be manipulated separately, however for best results their parameters should be identical. Each thruster also has a rigid body with a defined mass (0.3) and this rigid body is attached to the parent drone body using a 2D Fixed Joint.
The main Thruster.cs parameters to configure would be the thrust coefficient, maximum RPM, and the spinup rate.
The quadcopter also had a rigid body with a defined mass (1) along with a simple collider to prevent it from passing through the surface platform.
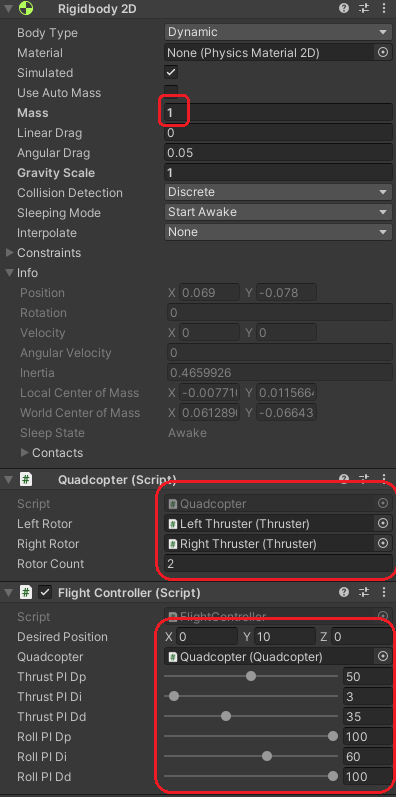
The rotors and rotor count are set in the Quadcopter.cs script and the target position and PID control coefficients in the FlightControl.cs script.
Project is created with:
- Unity 2020.3.21f1
When we run the scene the quadcopter lifts off the ground, moves towards the specified altitude, and settles there.
The P thrust values can be modified to change how quickly the drone reaches the desired high.
The D thrust value dictates how smooth our trajectory is and can be used to minimize overshooting at a cost of slower convergence.
The I thrust value allows the system to overcome unforeseen disturbances in the environment and have a smoother recovery.
The roll PID coefficients provide the same role but for pitch.