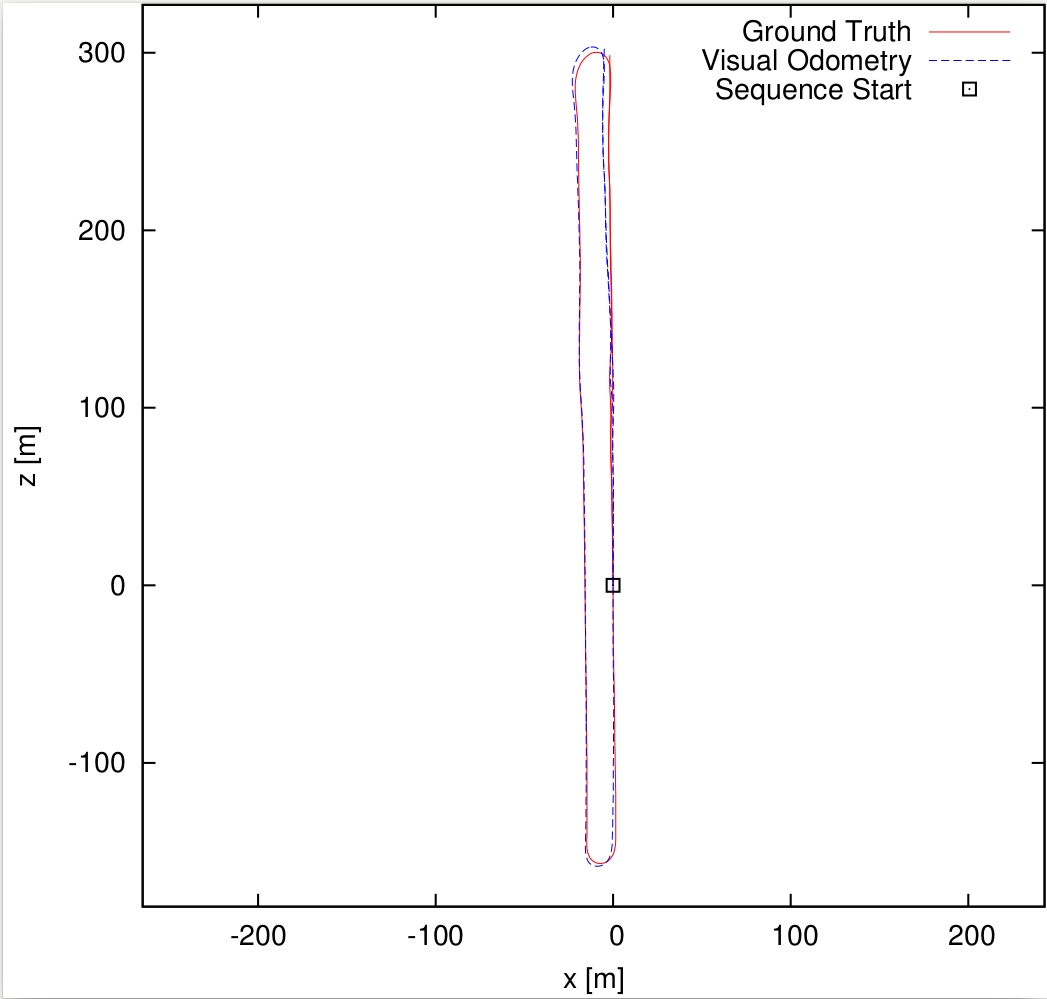
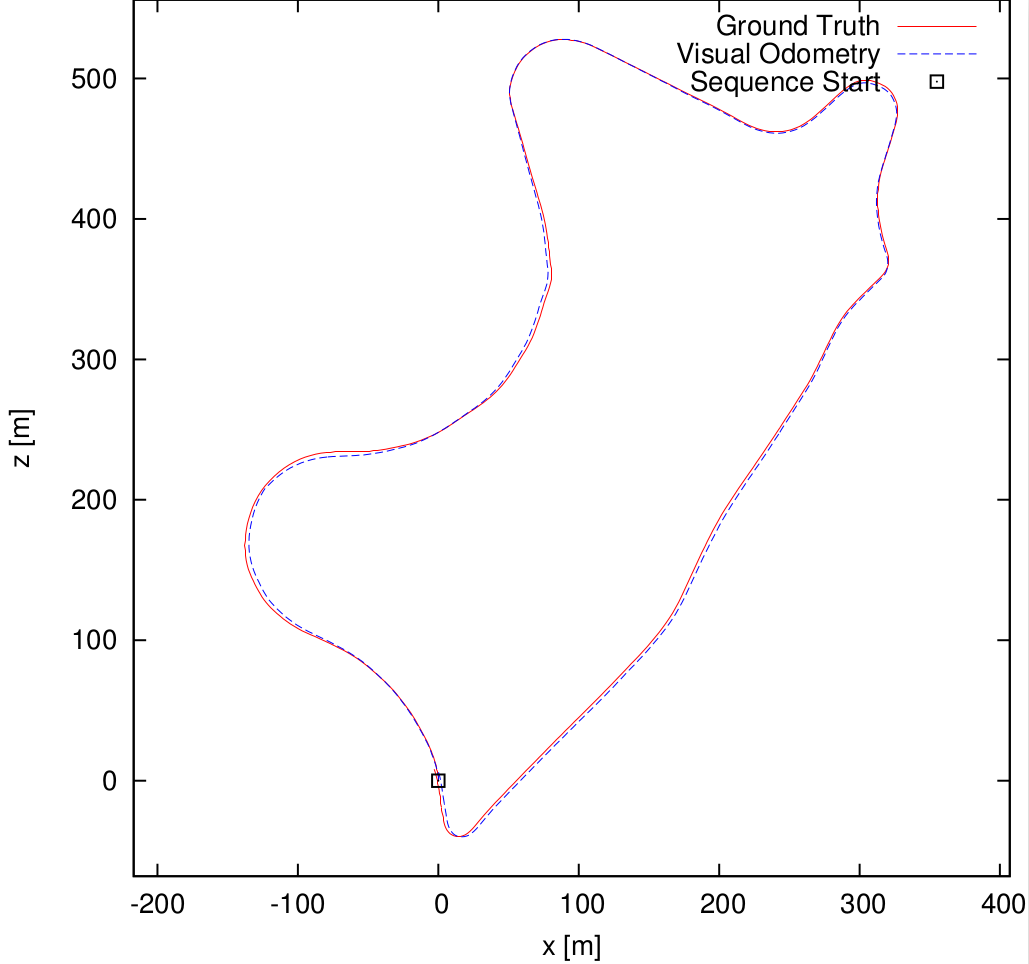
System is developed to achieve Visual Odometry for a moving car, using the output of a stereo camera. Rectified stereo images from a moving camera is used to estimate camera pose and reconstruct a 3D map of scene points. Our system is further optimized using bundle adjustment and pose-graph optimization. Developed model was used to estimate the trajectory of the camera for various scenarios in the KITTI dataset.
Visual Odometry results for two sequences from the KITTI dataset.

OpenCV2.4
PCL
g2o
mkdir build
cd build
cmake ..
make
cd <project_dir>
./vo PATH_TO_LEFT_IMAGE_SET_DIRECTORY PATH_TO_RIGHT_IMAGE_SET_DIRECTORY PATH_TO_YAML_FILE
Xiaoyu Zhou @ucsdxiaoyuzhou
Akshaya Purohit @akshayapurohit23
Bolun Zhang @zblzcj
Leonard Melvix @lmelvix