
pip install mlx2md
python -m mlx2md -i example.mlx
System Definition
clc
clear
syms x1 x2 x3 x4 x5 x6 x7 x8 u_x u_y;
% System's Type
MIMO = 1;
% constants
m = 0.11;
Ib = 1.76e-5;
rb = 0.02;
b = m/ (m + Ib/ rb^2)
g = 9.81;
% Non-linear system's state-space
X = [x1 x2 x3 x4 x5 x6 x7 x8];
U = [u_x u_y];
f =[ x2;
b*(x1*x4*x4+x4*x5*x8-g*sin(x3));
x4;
u_x;
x6;
b*(x5*x8*x8+x1*x4*x8-g*sin(x7));
x8;
u_y;
];
% Linearized system's state-space
As = jacobian(f, X);
A = subs(As, [X,U], [0 0 0 0 0 0 0 0 0 0]);
A = double(A)
n = length(A);
Bs = jacobian(f, U);
B = subs(Bs, [X,U], [0 0 0 0 0 0 0 0 0 0]);
B = double(B)
[~,p] = size(B);
C = [1 0 0 0 0 0 0 0; 0 0 0 0 1 0 0 0]
[l,~] = size(C);
D = zeros(l,p)
sys = ss(A,B,C,D);
G=tf(sys)
Input_1_to_ouput1=G(1,2)
Input_2_to_ouput2=G(2,1)% Input_1_to_ouput1 is equal to Input_2_to_ouput2 so can
% split A into two SISO system
A_X=[0 1 0 0
0 0 -g*b 0
0 0 0 1
0 0 0 0]
B_X=[0; 0; 0 ;1]
C_X=[1 0 0 0]
D_X=[0]rank(obsv(A,C)) % == 8
rank(ctrb(A,B)) % == 8
%% so our system is minimaldesired_OS = 10;
Ts=1;
zita = 0.59;
w = 6.77;
sd_1=-zita*w + w * sqrt(zita^2-1)
sd_2=-zita*w - w * sqrt(zita^2-1)
sd_3=-20
sd_4=-30K_X=place(A_X,B_X,[sd_1 sd_2 sd_3 sd_4])
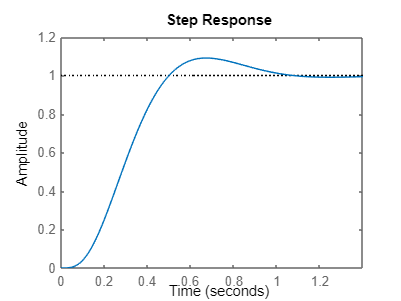
K = [K_X 0 0 0 0;0 0 0 0 K_X]controlled_tf=tf(ss(A_X-B_X*K_X,B_X,C_X,D_X))static_compensator=evalfr(controlled_tf,0)^(-1);
step(static_compensator*controlled_tf);
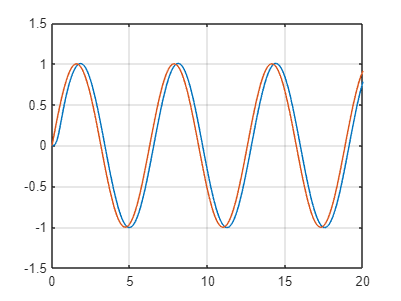
t = linspace(0, 20, 1000); % Time Vector
u = sin(t); % Forcing Function
y = lsim(static_compensator*controlled_tf, u, t); % Calculate System Response
figure(1)
plot(t, y, t, u)
gridA_bar = [A_X zeros(4,1); -C_X zeros(1,1)];
B_bar = [B_X; zeros(1,1)];
k_new = place(A_bar,B_bar,[sd_1,sd_2,sd_3,sd_4,-40])
k_d = [k_new(1:4) 0 0 0 0; 0 0 0 0 k_new(1:4)]
dynamic_pre_comp = [-k_new(:,5:end) 0; 0 -k_new(:,5:end)]b (1x1):
0.7143
A (8x8) double:
0 1.0000 0 0 0 0 0 0
0 0 -7.0071 0 0 0 0 0
0 0 0 1.0000 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 1.0000 0 0
0 0 0 0 0 0 -7.0071 0
0 0 0 0 0 0 0 1.0000
0 0 0 0 0 0 0 0
B (8x2) double:
0 0
0 0
0 0
1 0
0 0
0 0
0 0
0 1
C (2x8) double:
1 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0
D (2x2) double:
0 0
0 0
G =
From input 1 to output...
-7.007
1: ------
s^4
2: 0
From input 2 to output...
1: 0
-7.007
2: ------
s^4
Continuous-time transfer function.
Input_1_to_ouput1 =
0
Static gain.
Input_2_to_ouput2 =
0
Static gain.
A_X (4x4) double:
0 1.0000 0 0
0 0 -7.0071 0
0 0 0 1.0000
0 0 0 0
B_X (4x1) double:
0
0
0
1
C_X (1x4) double:
1 0 0 0
D_X (1x1):
0
ans (1x1):
8
ans (1x1):
8
sd_1 (1x1):
-3.9943 + 5.4661i
sd_2 (1x1):
-3.9943 - 5.4661i
sd_3 (1x1):
-20
sd_4 (1x1):
-30
K_X (1x4) double:
1.0e+03 *
-3.9245 -1.0111 1.0453 0.0580
K (2x8) double:
1.0e+03 *
-3.9245 -1.0111 1.0453 0.0580 0 0 0 0
0 0 0 0 -3.9245 -1.0111 1.0453 0.0580
controlled_tf =
-7.007
---------------------------------------------
s^4 + 57.99 s^3 + 1045 s^2 + 7085 s + 2.75e04
Continuous-time transfer function.
k_new (1x5) double:
1.0e+05 *
-0.4437 -0.0698 0.0336 0.0010 1.5698
k_d (2x8) double:
1.0e+04 *
-4.4368 -0.6978 0.3365 0.0098 0 0 0 0
0 0 0 0 -4.4368 -0.6978 0.3365 0.0098
dynamic_pre_comp (2x2) double:
1.0e+05 *
-1.5698 0
0 -1.5698
k_new (1x5) double:
1.0e+05 *
-0.4437 -0.0698 0.0336 0.0010 1.5698