Sistem Pengaturan Lalu Lintas dengan Mikro-Prosesor
Pengaturan lalu lintas di persimpangan jalan dimaksudkan untuk mengatur pergerakan kendaraan pada masing-masing kelompok pergerakan kendaraan agar dapat bergerak secara bergantian sehingga tidak saling mengganggu antar-arus yang ada. Lampu ini yang menandakan kapan kendaraan harus berjalan dan berhenti secara bergantian dari berbagai arah dengan perhitungan yang tepat sesuai kondisi di lapangan dengan memperhatikan aspek volume lalu lintas di setiap jalur.
Lampu lalu lintas terdiri dari tiga warna, yakni merah, kuning, dan hijau. Merah untuk berhenti, kuning untuk memperlambat kendaraan dan siap untuk berhenti, lalu warna hijau untuk jalan atau bergerak. Pada desain perempatan jalan lampu hijau hanya menyala di satu sisi jalur, sedangkan ketiga jalur lainnya harus berwarna merah, pengaturan sistem yang demikian ditujukan untuk keamanan dan kelancaran pengguna jalan yang melintas.
Angka kecelakaan yang mencederai pejalan kaki yang menyeberang jalan relatif tinggi sehingga perlu diambil langkah untuk melindungi pejalan kaki pada saat menyeberang jalan dari kecelakaan dengan kendaraan bermotor perlu dilakukan langkah untuk melindungi pejalan kaki yang disesuaikan berdasarkan faktor jumlah pejalan kaki yang menyeberang jalan serta arus lalu lintas kendaraan.
Pelican crossing sendiri merupakan metode jenis penyeberangan pejalan kaki, fasilitas penyeberangan yang dilengkapi dengan tombol untuk mengaktifkan lampu lalu lintas, bila tombol dipencet maka beberapa saat kemudian lampu bagi pejalan kaki diaktifkan dan menjadi hijau bagi pejalan kaki, dan merah untuk lalu lintas kendaraan. Waktu hijau untuk pejalan kaki pun harus diatur dan dikaji dengan lebar jalan hingga volume kendaraan, bisa lebih lama jika di tempat tersebut banyak penyeberang jalannya, namun juga bisa hanya sebentar agar tidak mengganggu arus jalan bagi pengguna kendaraan.
Pada solusi yang ditawarkan kali ini, akan digunakan Chip ATMega328P yang terinstall Bootloader Arduino.
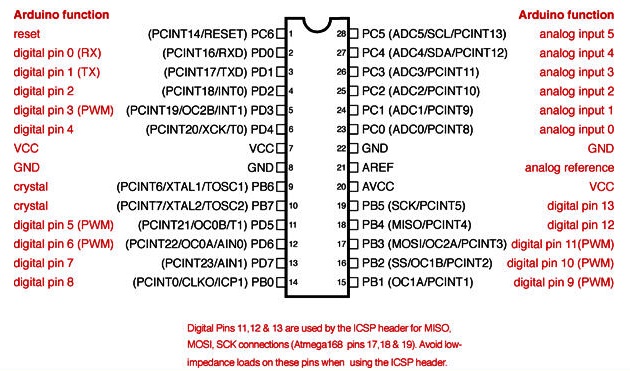
Untuk menyatakan ketiga warna rambu lalu lintas, digunakan lampu LED RGB (Red-Green-Blue). Warna merah dinyatakan dengan lampu Red, warna hijau dinyatakan dengan lampu Green, sedangkan warna kuning dinyatakan dengan kombinasi lampu Red dan Green.
Pada kali ini, digunakan lampu LED RGB Common Cathode. Tiap-tiap pin lampu (kecuali pin common cathode) dihubungkan pada output digital dari mikro-kontroler. Untuk membatasi arus yang mengalir pada LED, diberikan resistor sebesar 1kOhm sebelum terhubung dengan mikro-kontroler.

Pada kali ini, pin-pin yang digunakan untuk men-drive nyala lampu LED adalah sebagai berikut,
| RED | GREEN | BLUE | |
|---|---|---|---|
| NORTH | PC0 | PC1 | PC2 |
| EAST | PC3 | PC4 | PC5 |
| SOUTH | PD4 | PD5 | PD6 |
| WEST | PB0 | PB1 | PB2 |
Pin-pin yang dipilih berdasarkan beberapa hal yaitu dengan menghindari pin yang digunakan untuk komunikasi serial (TX, RX,) untuk “future use” dan pin untuk Interrupt pejalan kaki (INT0).
Untuk memudahkan dalam mengatur warna, dibuat konstanta-konstata warna nyala lampu LED bersesuaian dengan urutan pin warna lampu LED. Pada kasus ini terurut warna Red-Green-Blue. Untuk warna selain merah, hijau, dan biru dilakukan kombinasi penyalaan lampu untuk mendapatkan persepsi warna yang lebih variatif. Konstanta tersebut seperti pada berikut,
/* COLOR */
const uint16_t RED = 1;
const uint16_t GREEN = 2;
const uint16_t BLUE = 4;
const uint16_t YELLOW = RED|GREEN;
const uint16_t PURPLE = RED|BLUE;
const uint16_t CYAN = GREEN|BLUE;
const uint16_t WHITE = RED|GREEN|BLUE; Dari 4 arah kendaraan, hanya boleh ada satu jalur yang berjalan setiap waktu, sedangkan sisanya menunggu gilirannya masing-masing. Artinya dalam satu waktu, hanya ada satu lampu berwarna hijau atau kuning, tiga sisanya haruslah berwarna merah. Selain itu ada tombol interupsi untuk mempercepat durasi waktu hijau (durasi kuning tidak terpengaruh) guna memfasilitasi pejalan kaki untuk lewat dengan lebih cepat (in case, apabila pejalan kaki terburu-buru?). Hasilnya, adalah 12 state yang terdefinisi sebagai berikut,
| STATE | DURATION | NEXT STATE NEXT STATE ON INTERRUPT | NORTH | EAST | SOUTH | WEST |
|---|---|---|---|---|---|---|
| 0 | 10s | 1 | 8 | Green | Red | Red |
| 1 | 1s | 2 | 1 | Yellow | Red | Red |
| 2 | 10s | 3 | 9 | Red | Green | Red |
| 3 | 1s | 4 | 3 | Red | Yellow | Red |
| 4 | 10s | 5 | 10 | Red | Red | Green |
| 5 | 1s | 6 | 5 | Red | Red | Yellow |
| 6 | 10s | 7 | 11 | Red | Red | Red |
| 7 | 1s | 0 | 7 | Red | Red | Red |
| 8 | 5s | 1 | 8 | Green | Red | Red |
| 9 | 5s | 3 | 9 | Red | Green | Red |
| 10 | 5s | 5 | 10 | Red | Red | Green |
| 11 | 5s | 7 | 11 | Red | Red | Red |
Dari tabel state diatas, dapat diimplementasikan kedalam kode C seperti dibawah ini,
struct TState{
uint16_t lamp[4];
uint16_t interval;
int next;
int onInterrupt;
};
const struct TState states[] = {
{{GREEN,RED,RED,RED}, 10, 1, 8},
{{YELLOW,RED,RED,RED}, 1, 2, 1},
{{RED,GREEN,RED,RED}, 10, 3, 9},
{{RED,YELLOW,RED,RED}, 1, 4, 3},
{{RED,RED,GREEN,RED}, 10, 5, 10},
{{RED,RED,YELLOW,RED}, 1, 6, 5},
{{RED,RED,RED,GREEN}, 10, 7, 11},
{{RED,RED,RED,YELLOW}, 1, 0, 7},
{{GREEN,RED,RED,RED}, 5, 1, 8},
{{RED,GREEN,RED,RED}, 5, 3, 9},
{{RED,RED,GREEN,RED}, 5, 5, 10},
{{RED,RED,RED,GREEN}, 5, 7, 11},
};Untuk memudahkan dan mencegah kesalahan dalam peralihan state, menggunakan fungsi dapat menjadi salah satu solusi. Dalam fungsi tersebut selain melakukan perubahan state dan perhitungan durasi, juga melakukan pengaturan warna lampu.
int state;
#define CSTATE states[state]
uint16_t count;
void toState(int x){
state = x;
count = 1;
PORTC = CSTATE.lamp[1]<<3 | CSTATE.lamp[0];
PORTD&= 0x0F;
PORTD|= CSTATE.lamp[2]<<4;
PORTB = CSTATE.lamp[3];
}
ISR(TIMER1_COMPA_vect){
if(count<CSTATE.interval){
count++;
}else{
toState(CSTATE.next);
}
// Blink
PORTB |= 1<<5;
_delay_ms(100);
PORTB &= 0xFF ^ 1<<5;
}
ISR(INT0_vect){
state = CSTATE.onInterrupt;
} Pada main program, terjadi pengaturan timer, pengaturan interrupt, dan pastinya pengaturan I/O pin. Setelah itu, program utama tidak melakukan apa-apa. Seluruh jalannya pengaturan lampu rambu lalu-lintas bekerja pada sub-routine interrupt (External Interrupt dan Timer/Counter Interrupt).
int main(){
// PORT C&D as Output
DDRB = 0xFF;
DDRC = 0xFF;
DDRD = 0xFF;
// Blink
PORTB = 0;
// TIMER1: Lamp Control
// CTC
TCCR1A = 0;
TCCR1B = (1<<WGM12);
// prescaler 1024
TCCR1B |= (1<<CS12)|(1<<CS10);
// Enable Interrupt
TIMSK1 = 1<<OCIE1A;
// 1 sec
OCR1A = 15625;
// INT0: Pedestrian Crossing
// Active Low, Falling edge
EICRA = (1<<ISC01);
// Enable interrupt
EIMSK = (1<<INT0);
// Input PIN
DDRD ^= 1<<2;
PORTD |= 1<<2;
sei();
toState(0);
while(1);
return 1;
} Desain PCB untuk mikro-kontroler dilakukan dengan membuat clone PCB Arduino Uno. Pada implementasinya, juga dilakukan instalasi Bootloader Arduino untuk memudahkan dalam memprogram mikro-kontroler ini (I don’t wanna “brick” the micro-processor). Kristal osilator juga menggunakan frekuensi yang sama dengan Arduino Uno, 16MHz.
Untuk meng-upload Bootloader Arduino, kali ini digunakan Arduino lain sebagai ISP (In-System Program). Sebenarnya, akan lebih baik apabila menggunakan device yang lebih proper seperti USB-ASP, namun kali ini memanfaatkan resource yang telah tersedia (meminjam Arduino Uno punya teman).
Rangkaian untuk mem-burn Bootloader dapat dilihat seperti gambar dibawah. Intinya adalah menghubungkan pin SCK, MOSI, dan MISO, kontrol untuk Reset, dan pastinya catu daya 5V dan kristal osilator.
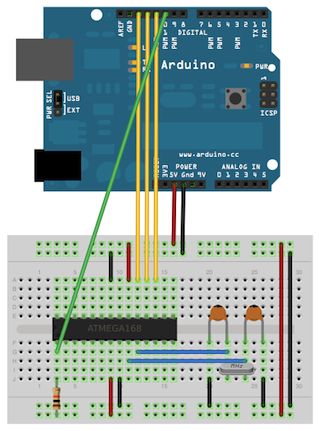
Library yang dibutuhkan telah tersedia pada Arduino IDE. Pertama, adalah mengupload program ISP pada Arduino yang telah ada. Dapat dilakukan dengan cara memilih pada menu File > Examples > Arduino ISP > Arduino ISP lalu upload kode tersebut. Kemudian hubungkan seperti rangkaian diatas, lalu upload Bootloader pada menu Tools > Programmer > Arduino as ISP dan Tools > Burn Bootloader.
Setelah bootloader ter-install, prosedur untuk mengupload ke Arduino Clone seperti mengupload kode Arduino biasa. Namun, karena Arduino Clone yang dibuat ini tidak memiliki USB Decoder untuk komunikasi Serial yang dibutuhkan untuk mengupload Kode ke Arduino Clone, digunakan FTDI USB Serial.