{kind=link}
Procedurally generated animation of the anti-twister mechanism and its connection to Spin(3).
Also known as Dirac's belt trick, a demonstration of an object that is subject to
Inspired by Jason Hise's animations, please check out: https://en.wikipedia.org/wiki/User:JasonHise
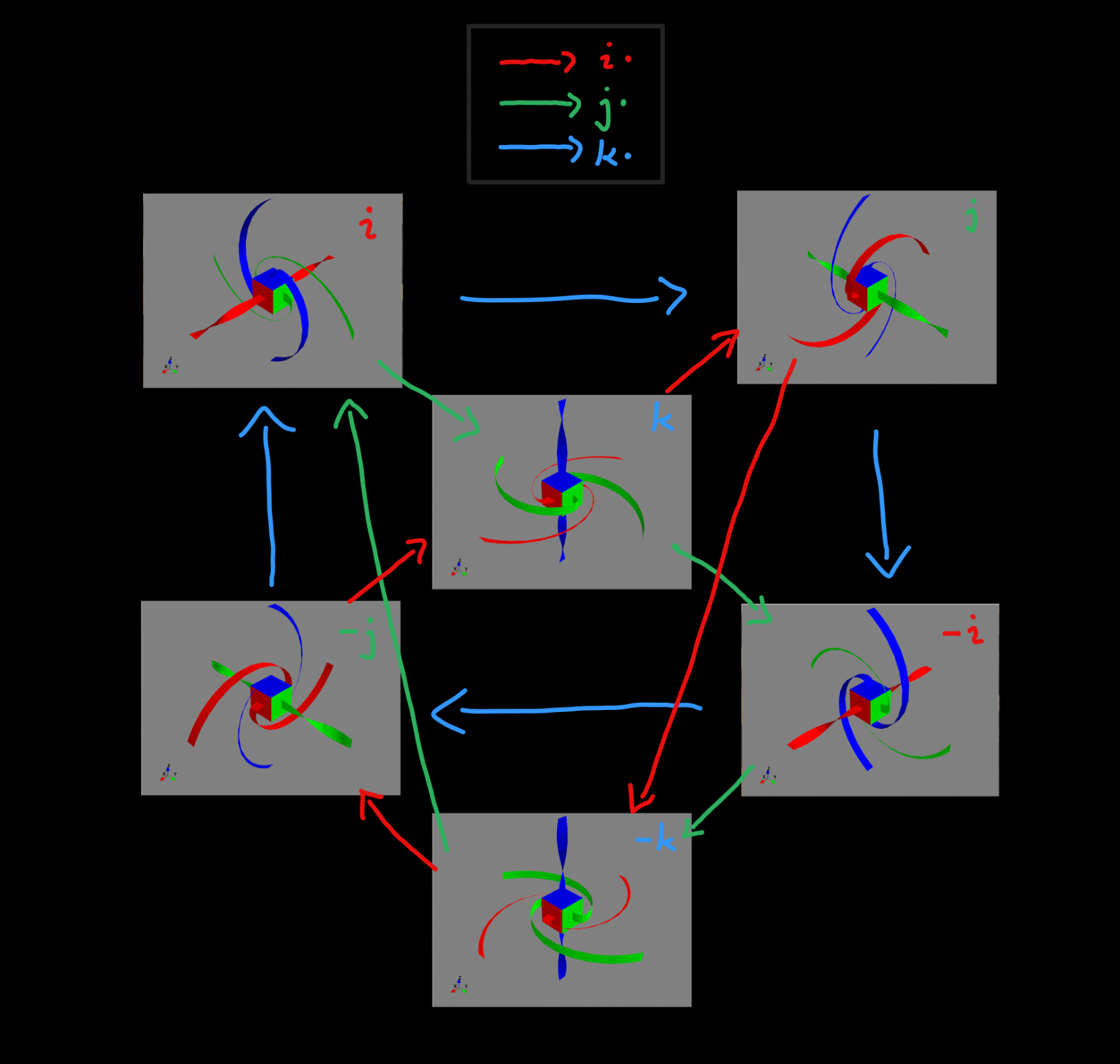 States of the anti-twister and their corresponding spin observables as quaternions
States of the anti-twister and their corresponding spin observables as quaternions
Coded using CGA (
In order to model the ribbon that is secured in
Finally, the interpolation motor
The full set of twelve equations (2 boundaries
Where we used
Which first normalizes the conformal point by dividing it with
After cd in the project folder download dependencies using
pip install -r requirements.txt
After that, you may use pyinstaller to build an executable
pyinstaller ./Spinor_Cube_Ver2.2.2.py --onefile
References:
[1] Belon, M.C.L., Hildenbrand, D. Practical Geometric Modeling Using Geometric Algebra Motors. Adv. Appl. Clifford Algebras 27, 2019–2033 (2017). https://doi.org/10.1007/s00006-017-0777-z