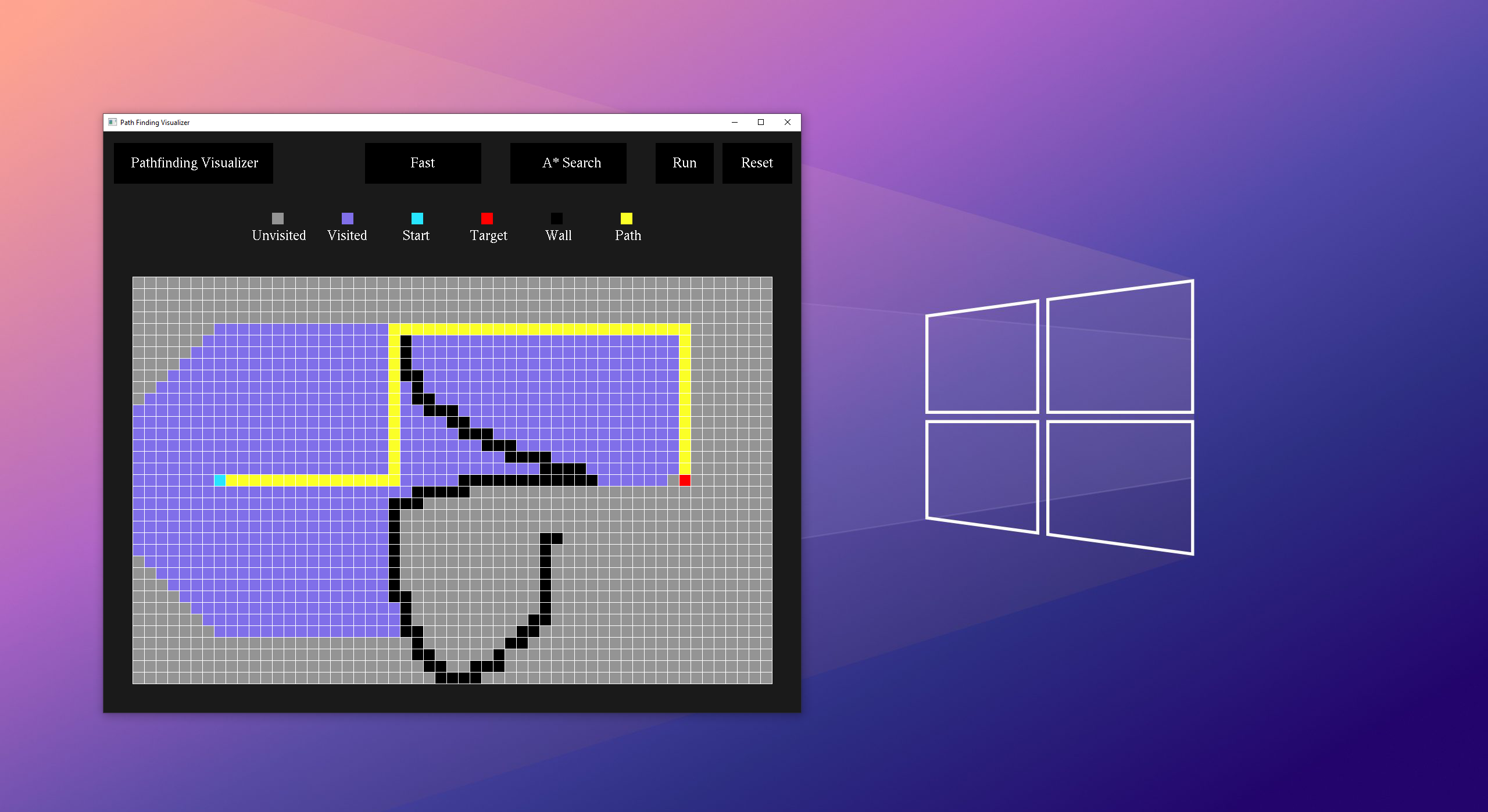
This is a visualization tool to help enhance and demonstrate my knowledge of pathfinding algorithms. The program works by creating a two-dimensional grid populated with nodes. Each node has an edge connecting it to its direct neighbor nodes with a weight of 1. The grid has a start node and a target node, and the user is allowed to draw wall nodes anywhere else on the grid. The algorithms will then find a path between the start and target node. Some algorithms guarantee the shortest path while others don't. The visited nodes animate in order of traversal to give the user a feel for how the algorithm works.
In the traditional implementation of Dijkstra's algorithm, you get a runtime complexity of
The purpose of this project was to enhance and demonstrate my understanding of pathfinding algorithms. It taught me a great deal about pathfinding algorithms, complexity analysis, and creating UI elements from scratch.
The only library used in this project is OpenGL. All of the display elements were created from scratch using OpenGL. CMakeLists.txt
is already configured to run on both Mac and Windows machines if you compile your projects with CMake.
Click here for a short 2 minute video demo of the tool!