This code was developed in conjunction with the journal publication "Granular Resistive Force Theory Implementation for Three-Dimensional Trajectories," in IEEE Robotics and Automation Letters ( Volume: 6, Issue: 2 ) 03 February 2021. (DOI: 10.1109/LRA.2021.3057052). https://ieeexplore.ieee.org/document/9345981
Laura Treers: ltreers@berkeley.edu
Cyndia Cao: cyndia_cao@berkeley.edu
Hannah Stuart: hstuart@berkeley.edu
Embodied Dexterity Group, UC Berkeley Mechanical Engineering
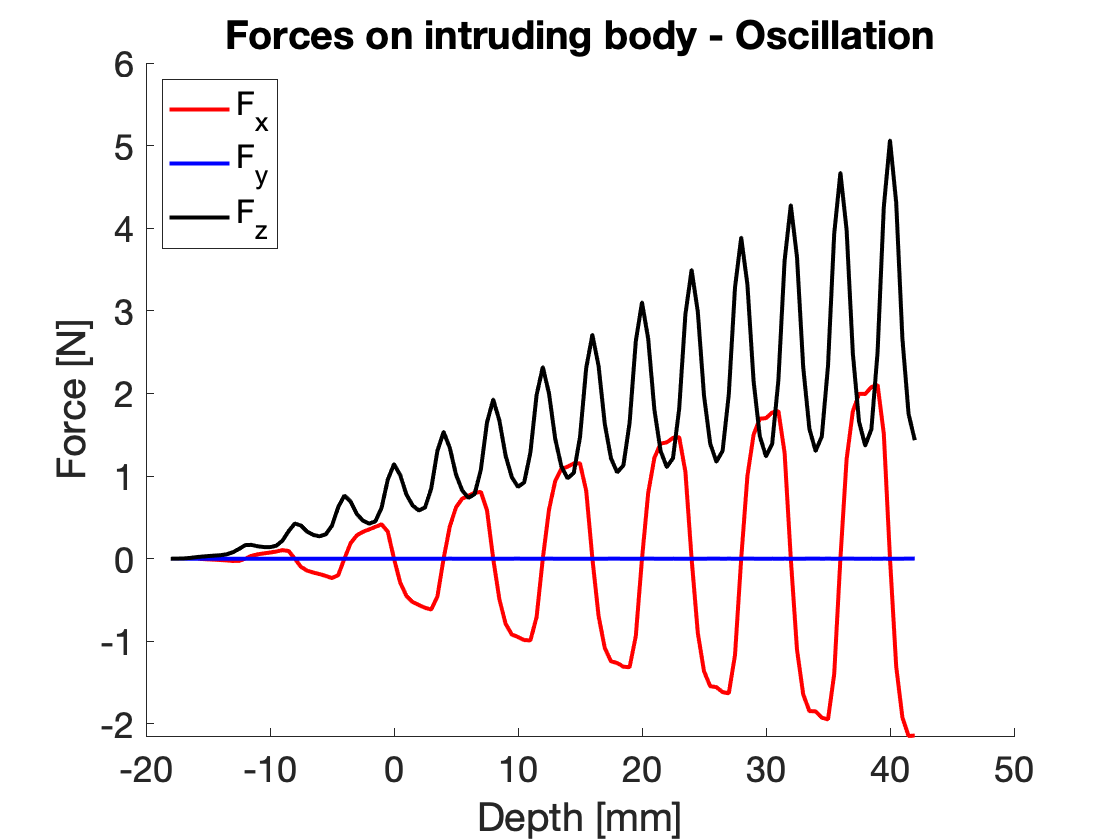
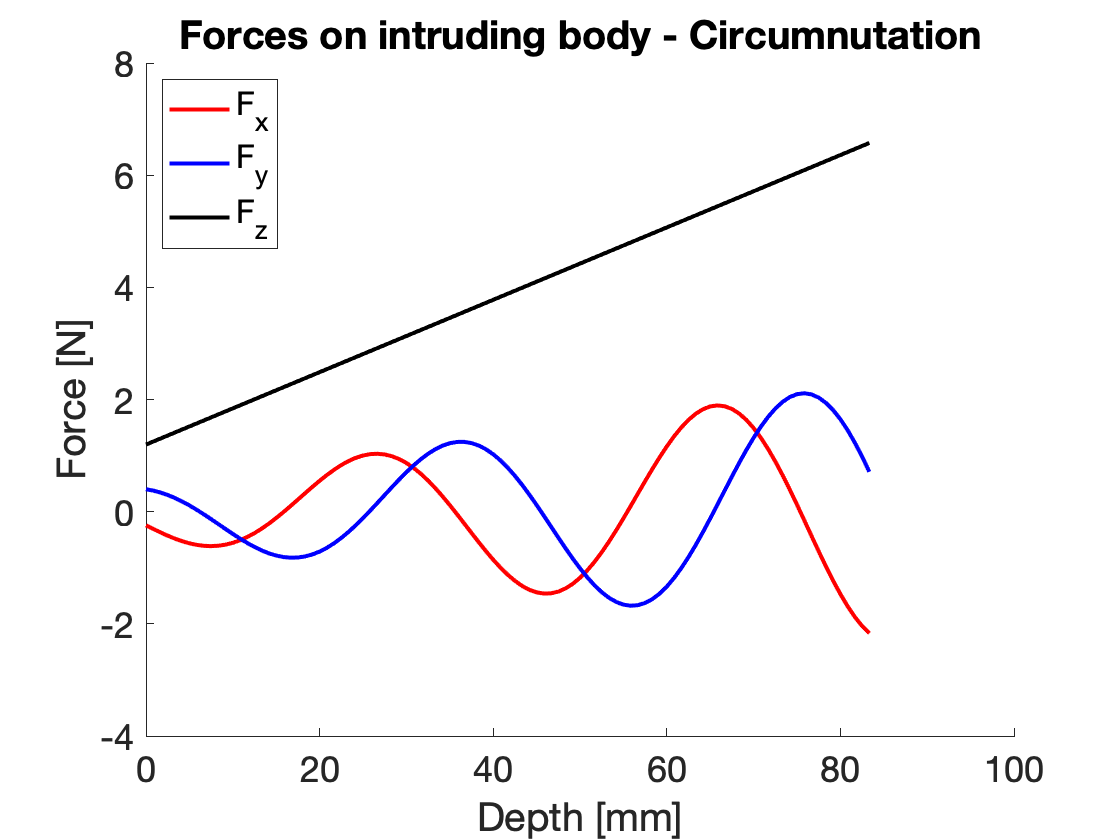
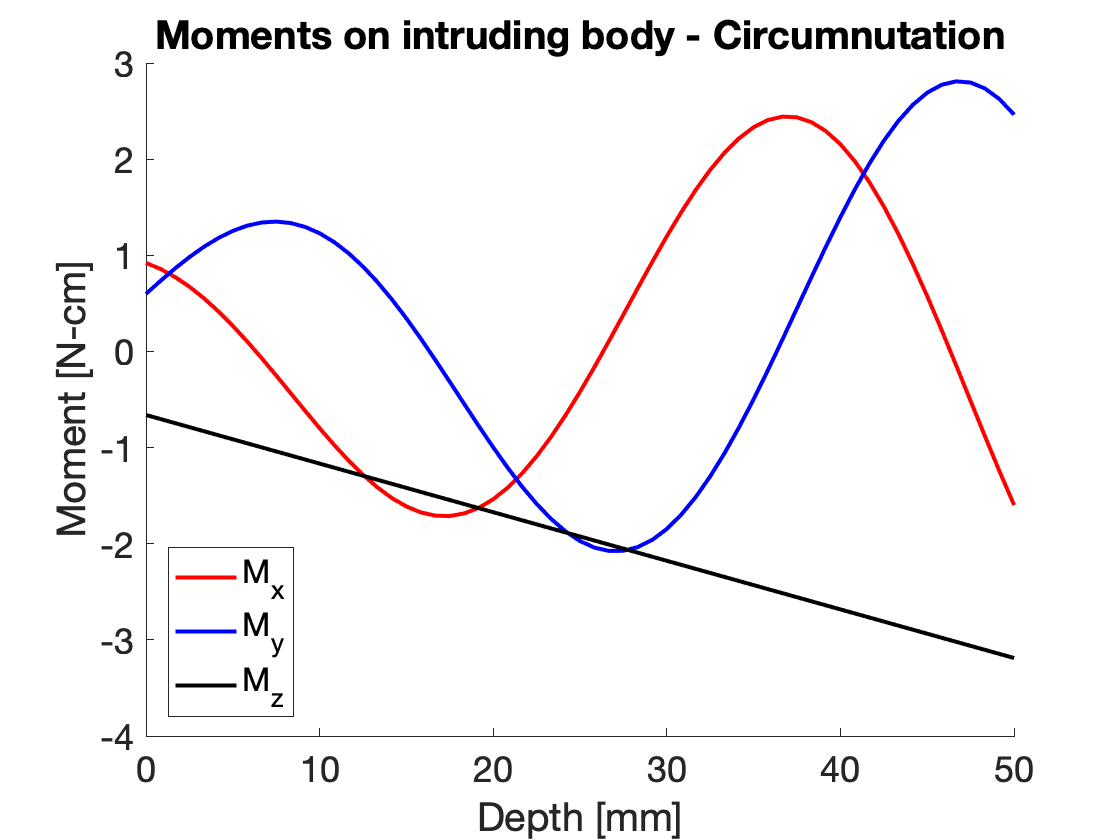
- MAIN shows two of the example bodies and trajectories that are explored in the paper, oscillation and circumnutation.
- We use the function "stlread" to import meshes of the bodies that are exported from CAD models.
- “ellipsoid-exp.stl” and “root-tip.stl” are the stl files representing the ellipsoid body for oscillation and root tip paraboloid for circumnutation, respectively.
- The body geometry is processed and passed to the function that calculates the forces on the body, "RFT_3D_BODY".
- We use the function "stlread" to import meshes of the bodies that are exported from CAD models.
- RFT_3D_BODY Calculates the forces and torques on a body intruding through granular media.
- Inputs: body geometry, body position & orientation, body velocity, RFT scaling coefficient (optional), STL representation (optional)
- Outputs: Force vector (N), Moment vector (N-cm)
- All 3D position & velocity vectors are row vectors.
- The orientation of the elements are defined using 3-2-x Euler angles. Angular velocity is defined relative to body corotational basis.
- NOTE: we do not include a formulation for 2D RFT in this code. We have inserted some stand-in functions to demonstrate the behavior of the code, but they are not tailored to any specific media. Users of this code should, for their own granular media, obtain coefficients α_x and α_z as a function of intrusion angle and orientation. See "A Terradynamics of Legged Locomotion on Granular Media", Li et al, Science 339, 1408 (2013) for one example of 2D RFT implementation.
- Our glass beads have a RFT scaling coefficient of ζ=0.33; however, this coefficient should be measured for each media.
- We request that all future works which utilize this code cite the publication "Granular Resistive Force Theory Implementation for Three-Dimensional Trajectories," in Robotics and Automation Letters 2021. (DOI: 10.1109/LRA.2021.3057052). Please feel free to reach out to the authors via email with any questions about implementing this code.
These plots are produced by the released code. The force values are slightly different than the published paper, which uses Li et al's 2D RFT coefficients.