Filippos Kokkinos and Iasonas Kokkinos
- Python 3.6+
- PyTorch 1.7.1
- PyTorch3D 0.4.0
- cuda 11.0
Clone code from repo:
git clone https://github.com/fkokkinos/to_the_point_3d_reconstruction
cd to_the_point_3d_reconstruction/
Setup Conda Env:
- Create Conda environment
conda create -n ttp
conda activate ttp
conda env update --file conda_env.yml
-
Install other packages and dependencies
Refer here for pytorch installation
conda install pytorch==1.7.1 torchvision==0.8.2 torchaudio==0.7.2 -c pytorch
-
Setup Pytorch3D
To setup Pytorch3D follow the instructions located here
-
Install torch parallel svd
We are using the torch-batch-svd package to compute in parallel multiple SVDs. To install follow instructions from https://github.com/KinglittleQ/torch-batch-svd
Download pre-trained models from here and unzip in misc folder
cd misc/
7z t cachedir.7z
CUB dataset can be downloaded from here. Unzip the file in misc/, else set the --cub_dir argument appropriately.
Training on CUB is done with
python main.py --name EXP_NAME --kp_loss_wt 0. --mask_loss_wt 2. --rigid_wt 3. --bdt_reg_wt 3. --print_freq 12 --display_freq 100 --tex_loss_wt 1. --tex_dt_loss_wt 1. --equiv_loss_wt 1. --weighted_camera --split train --vis_loss_wt 1. --batch_size 8 --flip_train --learnable_kp=False --mesh_dir meshes/bird_v2.obj --kp_dict meshes/bird_kp_dictionary_v3.pkl --tex_subdivision 1 --triangle_reg_wt 1. --tri_basis_wt 1. --basis_k 16 --arap_reg_wt 3. --betas_loss_wt 0. --sil_loss_wt 0. --normal_loss_wt 0. --def_loss_wt 5. --basis_cycle_loss_wt 0. --arap_basis_loss_wt 0.1 --save_epoch_freq 20 --def_steps 4
Exact hyper-parameters used for training of pre-trained models can be found in misc/cachedir/snapshots folder.
CUB experiment trained with keypoints:
python3 -m benchmark.evaluate --name bird_kp --num_train_epoch 130 --split test --weighted_camera --basis_k 16 --tex_subdivision 1 --mesh_dir meshes/bird_v2.obj --kp_dict meshes/bird_kp_dictionary_v3.pkl --def_steps 4 --split test
CUB experiment trained without keypoints:
python3 -m benchmark.evaluate --name bird_nokp --num_train_epoch 130 --split test --weighted_camera --basis_k 16 --tex_subdivision 1 --mesh_dir meshes/bird_v2.obj --kp_dict meshes/bird_kp_dictionary_v3.pkl --def_steps 4 --split test
If you find the code useful for your research, please consider citing:-
@inproceedings{
kokkinos2021to,
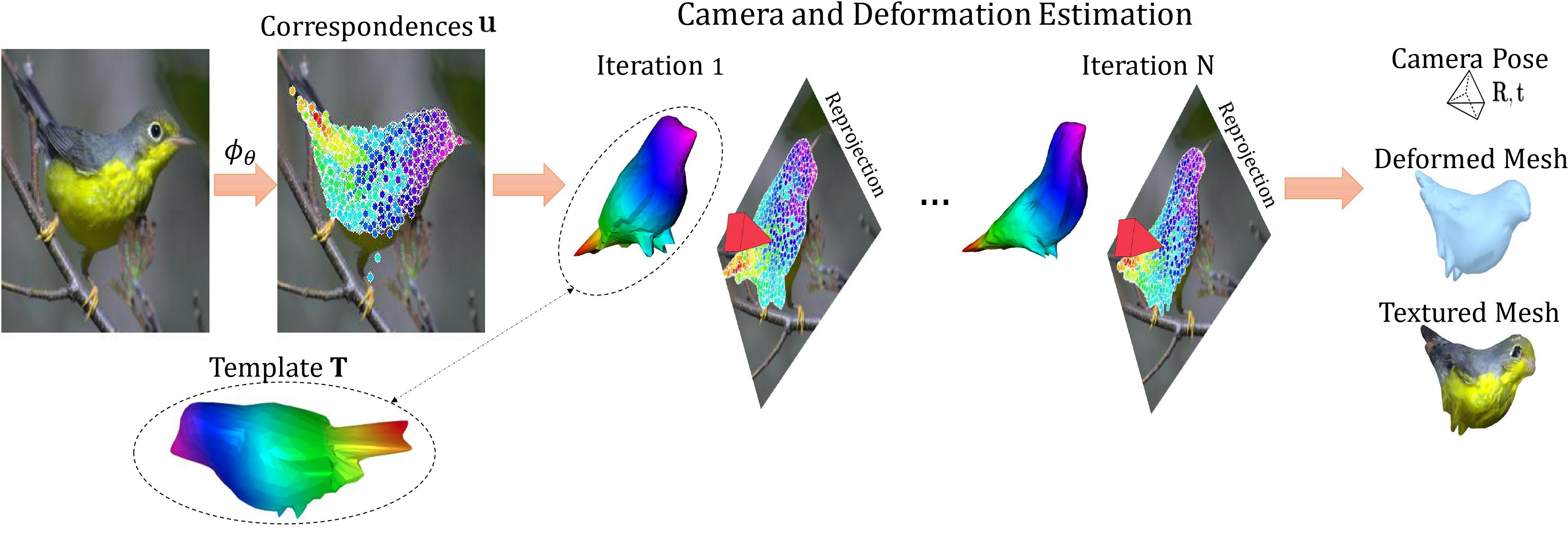
title={To The Point: Correspondence-driven monocular 3D category reconstruction},
author={Filippos Kokkinos and Iasonas Kokkinos},
booktitle={Advances in Neural Information Processing Systems},
editor={A. Beygelzimer and Y. Dauphin and P. Liang and J. Wortman Vaughan},
year={2021},
url={https://openreview.net/forum?id=AWMU04iXQ08}
}
This code repository uses code from ACFM, CMR, CSM, and BPnPNet repos.
For questions feel free to contact me at filippos.kokkinos[at]ucl.ac.uk .