Eclipse Cyclone DDS is by far the most performant and robust DDS implementation available on the market.
Beside, Cyclone DDS is developed completely in the open and is undergoing the acceptance process to become part of Eclipse IoT (see eclipse-cyclone-dds).
In order to build cyclone DDS you need to have installed on your host cmake v3.6.0 or higher, the Java 8 JDK or simply the Java 8 RE, and Apache Maven 3.5.x or higher.
Assuming that git is also available on your machine then, simply do:
$ git clone https://github.com/eclipse/cyclonedds.git
$ cd cyclonedds
$ mkdir build
$ cd build
$ cmake ../src
$ make
$ make install
At this point you are ready to use cyclonedds for your next DDS project!
Median small message throughput measured using the Throughput example between two Intel(R) Xeon(R) CPU E3-1270 V2 @ 3.50GHz (that's 2012 hardware ...) running Linux 3.8.13-rt14.20.el6rt.x86_64, connected via a quiet GbE and when using gcc-6.2.0 for a RelWithDebInfo build is:
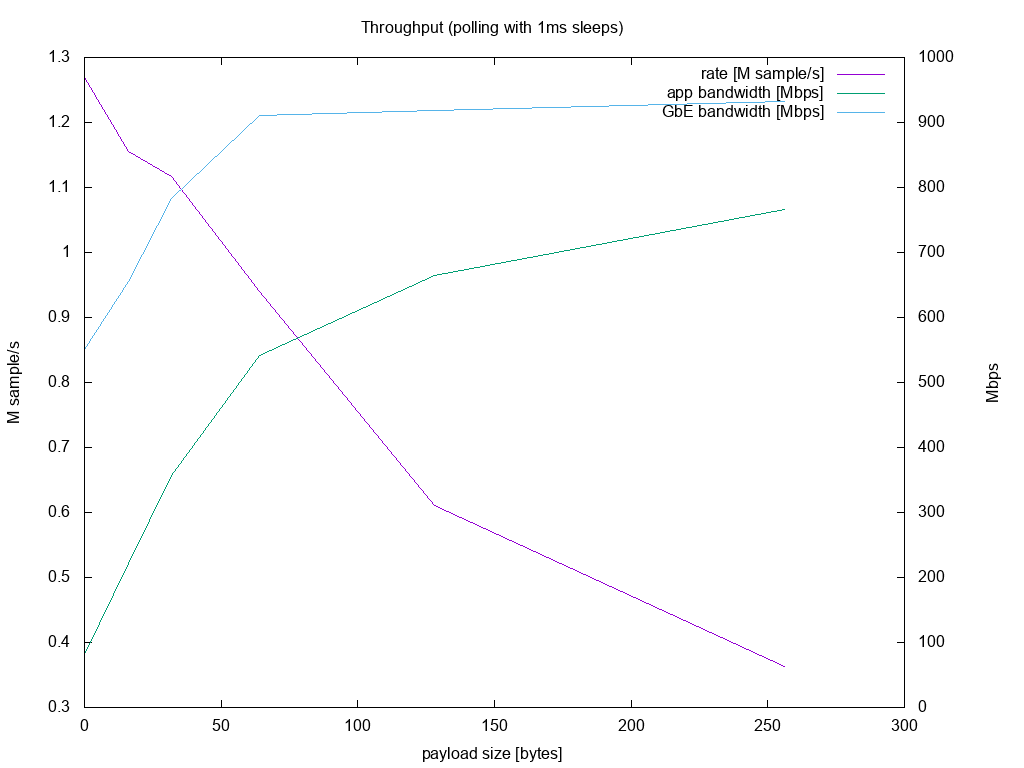
This is with the subscriber in polling mode. Listener mode is marginally slower; using a waitset the
message rate for minimal size messages drops to 600k sample/s in synchronous delivery mode and about
750k samples/s in asynchronous delivery mode. The configuration is an out-of-the-box configuration,
tweaked only to increase the high-water mark for the reliability window on the writer side. For
details, see the scripts in the performance directory and the data.
There is some data on roundtrip latency below.
Now that you have built and installed cyclonecdds it is time to experiment with some examples.
The first example we will show you how to build and run, measures cyclonedds latency and will allow you to see with your eyes how fast it is!
Do as follows:
$ cd cyclonedds/src/examples/roundtrip
$ mkdir build
$ cd build
$ cmake ..
$ make
Now that you've build the roundtrip example it is time to run it.
On one terminal start the applications that will be responding to cyclonedds pings. $ ./RoundtripPong
On another terminal, start the application that will be sending the ping.
$ ./RoundtripPing 0 0 0
# payloadSize: 0 | numSamples: 0 | timeOut: 0
# Waiting for startup jitter to stabilise
# Warm up complete.
# Round trip measurements (in us)
# Round trip time [us] Write-access time [us] Read-access time [us]
# Seconds Count median min 99% max Count median min Count median min
1 28065 17 16 23 87 28065 8 6 28065 1 0
2 28115 17 16 23 46 28115 8 6 28115 1 0
3 28381 17 16 22 46 28381 8 6 28381 1 0
4 27928 17 16 24 127 27928 8 6 27928 1 0
5 28427 17 16 20 47 28427 8 6 28427 1 0
6 27685 17 16 26 51 27685 8 6 27685 1 0
7 28391 17 16 23 47 28391 8 6 28391 1 0
8 27938 17 16 24 63 27938 8 6 27938 1 0
9 28242 17 16 24 132 28242 8 6 28242 1 0
10 28075 17 16 23 46 28075 8 6 28075 1 0
The number above were measure on Mac running a 4,2 GHz Intel Core i7 on December 12th 2018. From these number you can see how the roundtrip is incredibly stable and the minimal latency is now down to 17 micro-seconds (used to be 25 micro-seconds) on this HW.
The Cyclone DDS documentation is available here.