![]()

Computer Vision library for FTC based on OpenCV, featuring beacon color and position detection, as well as an easy-to-use VisionOpMode format and many additional detection features planned in the future.
- Clone FTCVision into a clean directory (outside your robot controller app) using the following command:
git clone --depth=1 https://github.com/lasarobotics/ftcvision. - Open the FTCVision project using Android Studio
- Copy your OpModes from your robot controller directory into the appropriate directory within
ftc-robotcontroller. Then, modify theFtcOpModeRegisterappropriately to add your custom OpModes. - Before running the app for the first time, install the "OpenCV Manager" from the Google Play Store to enable Vision processing.
- Run and test the code! Let us know if you encounter any difficulties.
- You can now write your own
VisionOpMode!
- Clone FTCVision into a clean directory (outside your robot controller app) using the following command:
git clone --depth=1 https://github.com/lasarobotics/ftcvision. - Navigate to the FTCVision directory that you just cloned and copy the
ftc-visionlibandopencv-javafolders into your existing robot controller app. - Open your robot controller app in Android Studio. Make sure you have the
Projectmode selected in the project browser window (so you can see all of the files in your project). - Find your
settings.gradlefile and append the following two lines:
include ':opencv-java'
include ':ftc-visionlib'
- Find the
AndroidManifest.xmlunder yourftc-robotcontrollerfolder, sometimes namedsampleor similar. - Insert the following
uses-permissiontag in the appropriate location (look at the rest of the file for context).
<uses-permission android:name="android.permission.CAMERA" android:required="true" />
- Find your
build.gradlein the parent folder ofAndroidManifest.xmland insert the following line underdependencies:
compile project(':ftc-visionlib')
compile project(':opencv-java')
- Update Gradle configuration by pressing the green "Sync Project with Gradle Files" button in the header (this may take a minute)
- Copy in Vision opmodes (those that end in
VisionSample.java, located in[vision-root]/ftc-robotcontroller/src/main/java/com/qualcomm/ftcrobotcontroller/opmodes) from the FTCVision directory into your opmode directory. - Before running the app for the first time, install the "OpenCV Manager" from the Google Play Store to enable Vision processing.
- Run and test the code! Let us know if you encounter any difficulties.
- You can now write your custom
VisionOpMode!
This library is currently under insanely active development. We're in the Beta phase right now. If you have any questions or would like to help, send a note to smo-key (contact info on profile). Thank you!
Documentation for the stable library is available at http://ftcvision.lasarobotics.org.
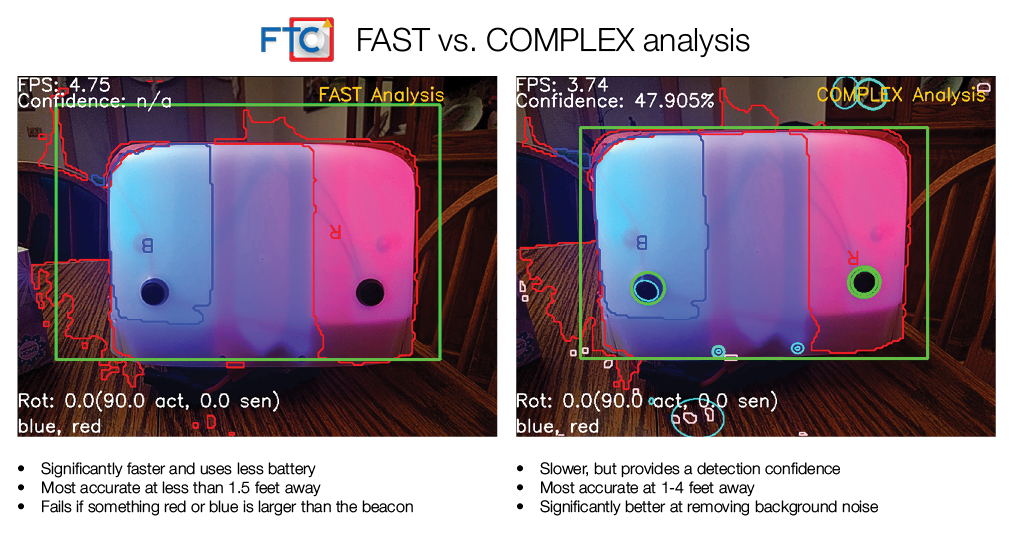
Yes! FTCVision can detect a beacon 0.5-4 feet away with 65% accuracy in 0.3 seconds. Here are some pictures. 😃


- Locate the lit target (the thing with two buttons) within the camera viewfield
- Move the robot to the lit target, while identifying the color status of the target
- Locate the button of the target color and activate it
- Beacon located successfully with automated environmental and orientation tuning.
- A competition-proof
OpModescheme created so that the robot controller does not need to be modified to use the app. - Now supports nearly every phone since Android 4.2, including both the ZTE Speed and Moto G.
- All initial goals complete - now tweaking beacon detection and preparing for something more...