This repository contains code and resources related to the paper RGB-based Category-level Object Pose Estimation via Decoupled Metric Scale Recovery by Jiaxin Wei, Xibin Song, Weizhe Liu, Laurent Kneip, Hongdong Li, and Pan Ji.

While showing promising results, recent RGB-D camera-based category-level object pose estimation methods have restricted applications due to the heavy reliance on depth sensors. RGB-only methods provide an alternative to this problem yet suffer from inherent scale ambiguity stemming from monocular observations. In this paper, we propose a novel pipeline that decouples the 6D pose and size estimation to mitigate the influence of imperfect scales on rigid transformations. Specifically, we leverage a pre-trained monocular estimator to extract local geometric information, mainly facilitating the search for inlier 2D-3D correspondence. Meanwhile, a separate branch is designed to directly recover the metric scale of the object based on category-level statistics. Finally, we advocate using the RANSAC-PnP algorithm to robustly solve for 6D object pose. Extensive experiments have been conducted on both synthetic and real datasets, demonstrating the superior performance of our method over previous state-of-the-art RGB-based approaches, especially in terms of rotation accuracy.
We have tested our code with the following configurations
- Ubuntu 20.04
- PyTorch 1.8.0
- torchvision 0.9.0
- CUDA 11.1
Create virtual environment
conda create -n dmsr python=3.6
conda activate dmsr
pip install -r requirements.txt
Build PointNet++ (source code has been modified to adapt to higher versions of PyTorch)
cd DMSR/pointnet2/pointnet2
python setup.py install
Build nn_distance
cd DMSR/lib/nn_distance
python setup.py install
Please follow the instructions in object-deformnet to prepare the NOCS dataset. The segmentation results from Mask R-CNN and predictions of NOCS can also be found here.
Important: delete obj_models/val/02876657/d3b53f56b4a7b3b3c9f016d57db96408 before preprocessing the datasets, otherwise it will cause errors.
The extended dataset containing depth and normal predictions can be downloaded here. Please use the following command to merge the files in each folder after downloading:
cat <folder_name>* > <folder_name>.tar.gz
tar xzvf <folder_name>.tar.gz
Now the DMSR/datasets directory is organized as follows:
datasets
├── NOCS
│ ├── CAMERA
│ │ ├── train
│ │ └── val
│ ├── Real
│ │ ├── train
│ │ └── test
│ ├── gts
│ │ ├── val
│ │ └── real_test
│ └── obj_models
│ ├── train
│ ├── val
│ ├── real_train
│ └── real_test
├── dpt_output
│ ├── CAMERA
│ │ ├── train
│ │ └── val
│ └── Real
│ ├── train
│ └── test
└── results
├── mrcnn_results
│ ├── real_test
│ └── val
└── nocs_results
├── real_test
└── val
python train.py --dataset CAMERA --result_dir checkpoints/camera
or
python train.py --dataset CAMERA+Real --result_dir checkpoints/real
Please download our trained models here and put it in the DMSR/pretrained directory.
To evaluate CAMERA data, run
python evaluate.py --data val --model ./pretrained/camera_model.pth --result_dir ./results/eval_camera
To evaluate REAL data, run
python evaluate.py --data real_test --model ./pretrained/real_model.pth --result_dir ./results/eval_real
We also provide processed files for fast verification of our results reported in the paper. Please download our processed files here and put it in the DMSR/results directory. Then, you can run the above commands to see the results shown in the terminal.
Please check our video for more qualitative results.
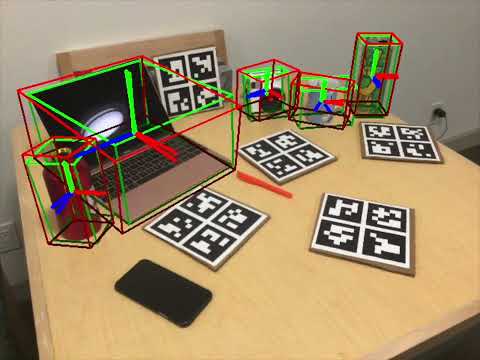
The predictions and ground truths are shown by red and green bounding boxes, respectively.
If you find our work useful in your research, please cite our paper:
@misc{wei2023rgbbased,
title={RGB-based Category-level Object Pose Estimation via Decoupled Metric Scale Recovery},
author={Jiaxin Wei and Xibin Song and Weizhe Liu and Laurent Kneip and Hongdong Li and Pan Ji},
year={2023},
eprint={2309.10255},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
If you have any questions, please feel free to contact Jiaxin Wei (weijx1421@foxmail.com).
Our code is developed based on SGPA and we extend the NOCS dataset using Omnidata models for training.