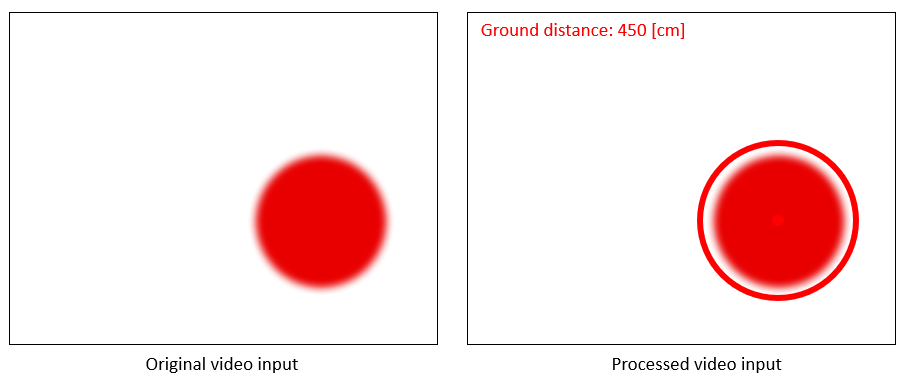
This programs are created to augment the user video feeds streamed from the drone to a personal computer. The augmented video will display the distance from the ground and utilize circle Hough Transform (CHT) to find and mark the red circle.
- Install Win32 Disk Imager on a Windows PC and write the custom Raspbian Lite image on a blank SD card to be inserted inside Raspberry Pi 3 model B. As an extra, refer to Ardupilot guide to set up Raspberry Pi connection with Pixhawk on your own.
- Install Advanced IP Scanner on Windows PC to find the Raspberry Pi IP address and use Bitvise SSH Client to establish the Secure Shell (SSH) connection between Windows PC and Raspberry Pi.
- Copy 00_pc_windows folder to a Windows PC and copy 01_rpi_raspian folder to the Raspberry Pi.
- Edit the a_prefix_variable.py file inside the folder 00_pc_windows and folder 01_rpi_raspian with Raspberry Pi and Windows PC IP addresss found earlier.
- Execute b_tcp_copter_interface.py on the Raspberry Pi and execute b_drone_landing_assistant.py on the Windows PC.
- User will be presented with a video live stream on the Windows PC and the stream will show the distance from the ground and mark any red circle that it found. Prior calibration on a_prefix_variable.py setting might be needed to detect red in YCrCb color range.