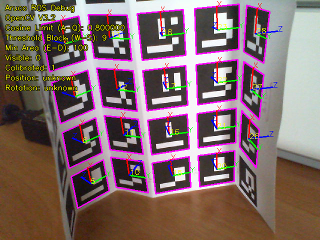
- Aruco marker detection and pose estimation.
- Multi marker pose estimation.
- Detection is not affected by lighting conditions.
- Can be used for low light marker traking.


- API documentation can be generated using Doxygen
-
The ROS package is called "maruco" to void collision with the already existing aruco package.
-
To install in your ROS project simply copy the aruco folder into your catkin workspace and execute "catkin_make" to build the code.
-
To test with a USB camera also install usb-camera and camera-calibration from aptitude to access and calibrate the camera.
-
Parameters
- debug
- When debug parameter is se to true the node creates a new cv window to show debug information.
- Default false
- use_opencv_coords
- When set opencv coordinates are used, otherwise ros coords are used (X+ depth, Z+ height, Y+ lateral)
- Default false
- cosine_limit
- Cosine limit used during the quad detection phase. The bigger the value more distortion tolerant the square detection will be.
- Default 0.8
- theshold_block_size
- Adaptive theshold base block size.
- Default 9
- min_area
- Minimum area considered for aruco markers. Should be a value high enough to filter blobs out but detect the smallest marker necessary.
- Default 100
- calibrated
- Used to indicate if the camera should be calibrated using external message of use default calib parameters
- Default true
- calibration
- Camera intrinsic calibration matrix as defined by opencv (values by row separated by _ char)
- Ex "260.3_0_154.6_0_260.5_117_0_0_1"
- distortion
- Camera distortion matrix as defined by opencv composed of up to 5 parameters (values separated by _ char)
- Ex "0.007_-0.023_-0.004_-0.0006_-0.16058"
- Camera distortion matrix as defined by opencv composed of up to 5 parameters (values separated by _ char)
- marker###
- These parameters are used to pass to the node a list of known markers, these markers will be used to calculate the camera pose in the world.
- Markers are declared in the format marker###: ""
- Ex marker768 "0.156_0_0_0_0_0_0"
- debug
-
ROS Subscribed topics
- topic_camera
- Camera image topic
- Default "/camera/rgb/image_raw"
- topic_camera_info
- Camera info_expects a CameraInfo message
- Default "/camera/rgb/camera_info"
- topic_marker_register
- Register markers in the node
- Default "/marker_register"
- topic_marker_remove
- Remove markers registered in the node
- Default "/marker_remove"
- topic_camera
-
ROS Published topics
- topic_visible
- Publishes true when a marker is visible_false otherwise
- Default "/visible"
- topic_position
- Publishes the camera world position relative to the registered markers as a Point message
- Default "/position"
- topic_rotation
- Publishes the camera world rotation relative to the registered markers
- Default "/rotation"
- topic_pose
- Publishes camera rotation and position as Pose message
- Default "/pose"
- topic_visible
- Opencv 2.4.9+
- Previous versions of opencv 2 might cause problems.
- CMake
- ROS (indigo and later)
- cv-bridge
- MIT license (Available on GitHub page)