![]()
Jiarui Hu1
·
MaoMao1
Hujun Bao1
·
Guofeng Zhang1
·
Zhaopeng Cui1*
1 State Key Lab of CAD&CG, Zhejiang University
* Corresponding author.
This is the official implementation of CP-SLAM: Collaborative Neural Point-based SLAM System. CP-SLAM system demonstrates remarkable capabilities in multi-agent deployment and achieves state-of-the-art performance in tracking, map construction, and rendering.
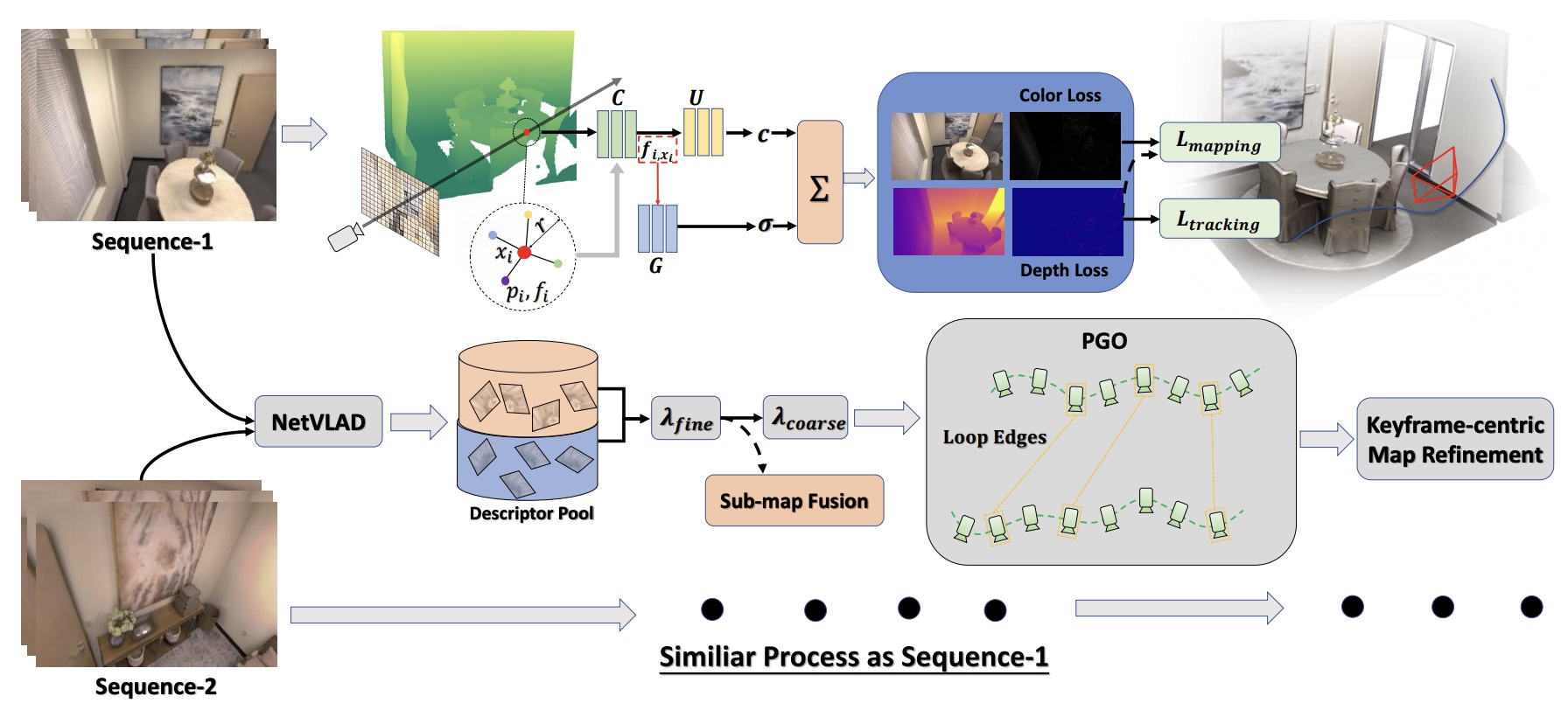
Table of Contents
- 2024.04.11 --- We have updated the
README.mdand are preparing to open-source our code! - 2024.04.26 --- Code for some functional modules, including
loop detection,pose graph,federated center, andshared data structure(detailed comments will come soon). - 2024.05.08 --- Code for main parts, including
optimizer,renderer,fusion center, andtracking and mapping modules. - Installation setup
We provide the Download link to
- Four single-agent trajectories. Each contains 1500 RGB-D frames.
- Four two-agent trajectories. Each is divided into 2 portions, holding 2500 frames, with the exception of Office-0 which includes 1950 frames per part.
- Two pre-trained NetVLAD models for the loop detection module.
@misc{hu2023cpslam,
title={CP-SLAM: Collaborative Neural Point-based SLAM System},
author={Jiarui Hu and Mao Mao and Hujun Bao and Guofeng Zhang and Zhaopeng Cui},
year={2023},
eprint={2311.08013},
archivePrefix={arXiv},
primaryClass={cs.CV}
}