Is extrinsic_R in avia_resize.yaml must be identity? #37
Comments
|
Thanks for your interest and testing! The extrinsic_R in avia_resize.yaml doesn't have to be an identity matrix. |
|
Thanks for your answers! |
|
I also tried to test the HILTI 2021 dataset. But trajectory which is estimated by FAST-LIVO very unstable and eventually diverged. I set the parameters provided here as shown in the code below. but FAST-LIVO diverge during the dataset playback.
And there is no part where the lens distortion is processed in the code. why is that ? And when the 3D point cloud of the rotating LiDAR is re-projected onto the image, how to deal with rear area pointclouds that are not visible in the image ? |
your translation values in your configuration file have the oposite symbols that the documentation from livox. The imu is behind and above from the Lidar, so I was asking me: isn't this values actually translation and rotation lidar w.r.t imu? |
Thank you for your great contribution!
I am testing hilti2021 dataset on FAST-LIVO which contains a livox mid70, an embeded IMU and a 1440x1080 10Hz global shutter camera.
I find that when I write really extrinsic parameters on the left which
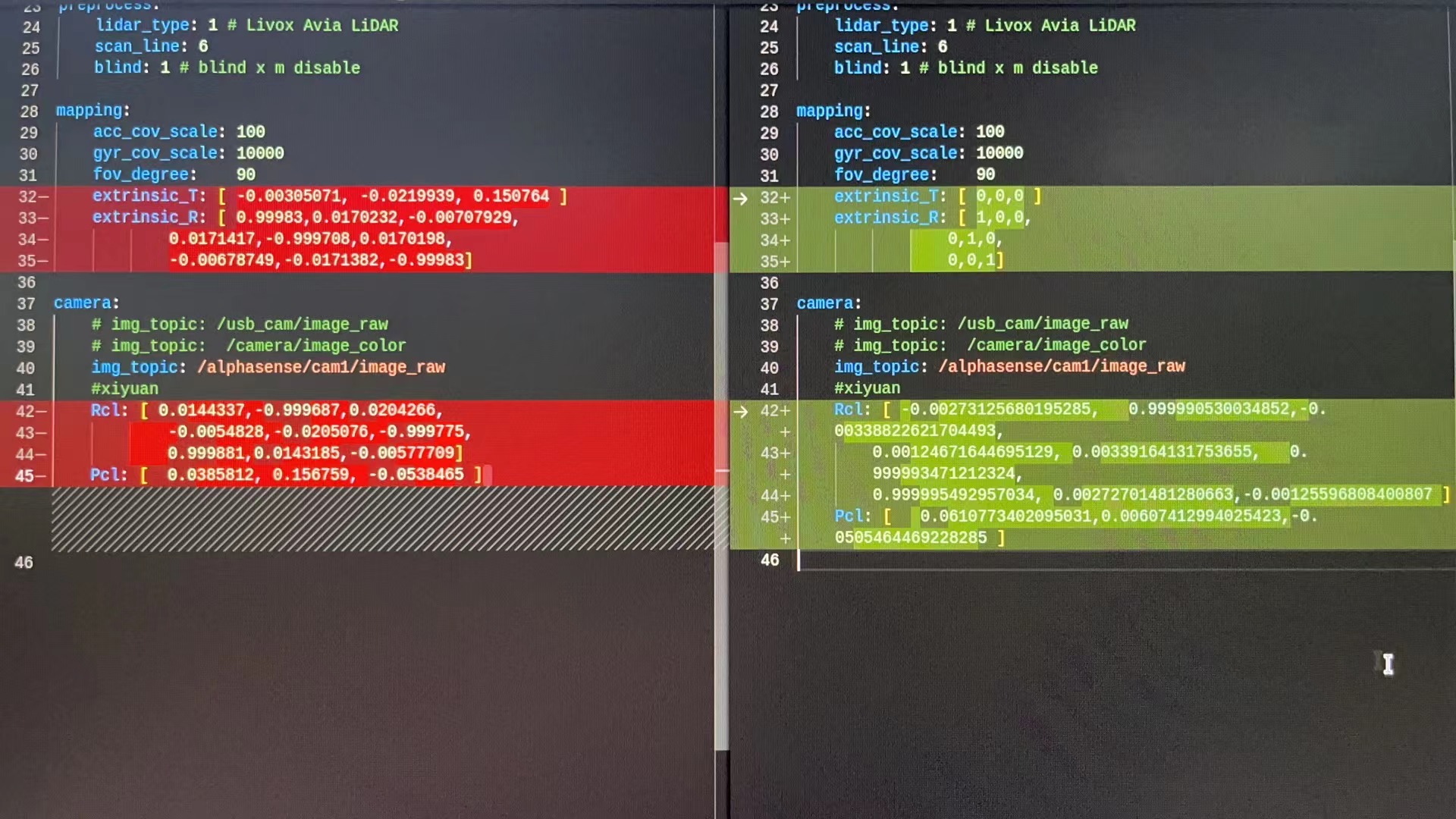
extrinsic_Ris not identity, FAST-LIVO will result in bad initialization showing that image is not aligned with livox scan.So I make some changes to force lidar and imu into one frame:
Then the image align well with livox scan.
I would like to know if extrinsic_R in avia_resize.yaml must be identity?
The text was updated successfully, but these errors were encountered: