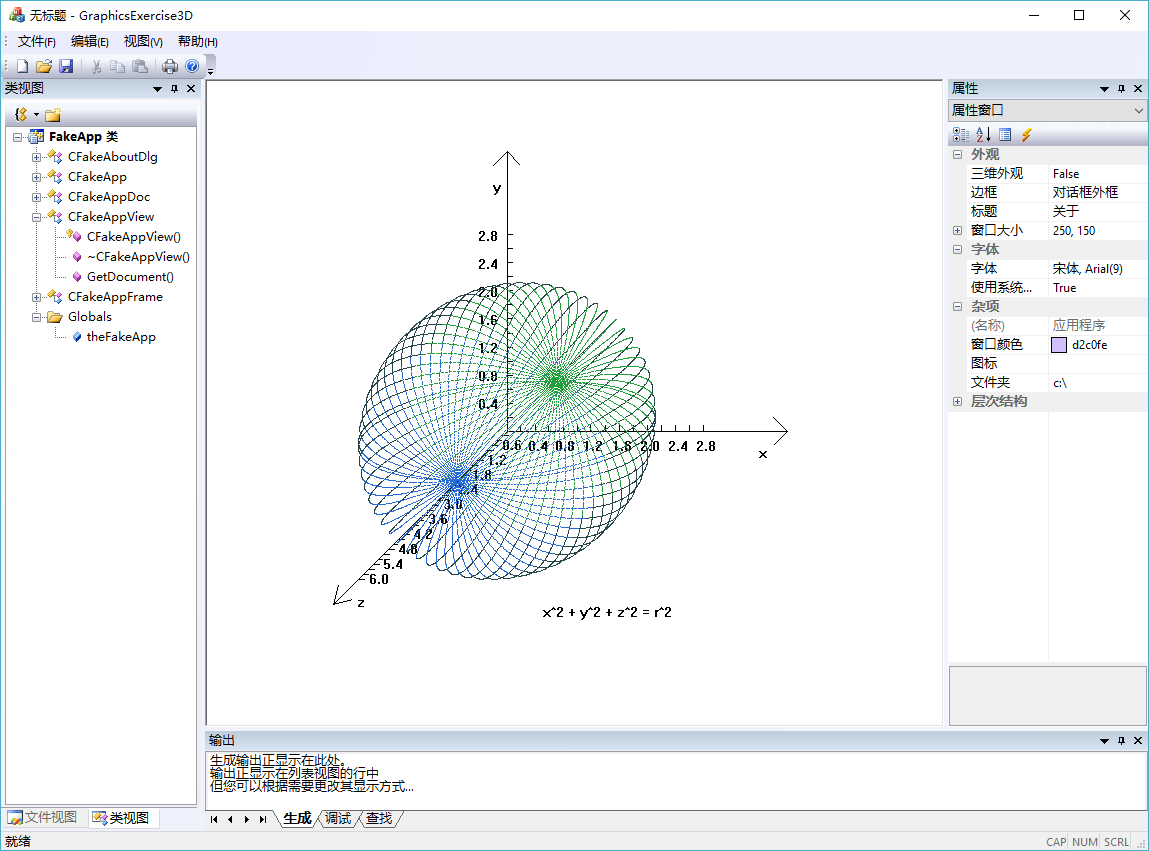
本文使用MFC的CDC类绘制三维坐标系及球面函数。首先计算推导出三维坐标在二维平面显示的坐标变换方程(使用斜二测视图),使用球面的参数方程,然后定义图形缩放比例规模、坐标轴位移,变换坐标系和规模等,最后绘制坐标轴及球面函数。
如果对绘制二维坐标系还不太熟悉可以先看上面系列链接的:使用MFC的CDC类绘制二维坐标系及正余弦函数,本文对二维绘制及绘制函数部分不再赘述。因为二维坐标系的博文已经分模块讲解地比较清楚了,而与三维坐标系的基本思路相同,所以本文大部分直接使用注释讲解。
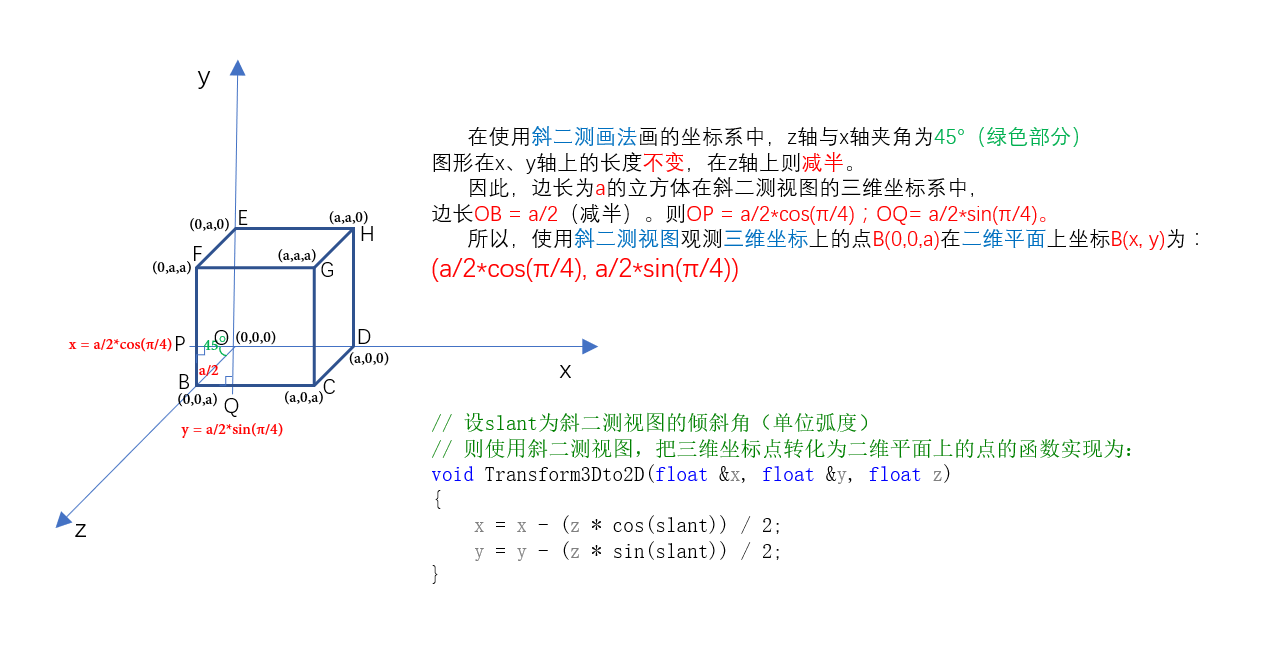
上图可知,只要使用Transform3Dto2D()函数,即可方便的把三维坐标转化为二维坐标(斜二测视图)。
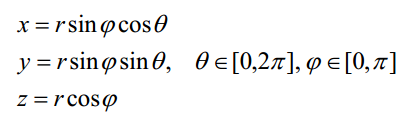
在三维空间直角坐标系中,以原点为球心、半径为 r 的球面的方程为 x^2 + y^2 + z^2 = r^2,其参数方程为
Visual Studio- 新建项目 - MFC应用程序 - 命名为GraphicsExercise3D - 确定 - 下一步 - 应用程序类型选择单个文档 - 完成
在GraphicsExercise3DView.h添加以下内容
// 操作
public:
void SetScale(int scale);
void SetTransformOrigin(float transformOriginX, float transformOriginY);
void SetPlotSphere(float radius, float stepPhi, float stepTheta);
void SetSlantRadian(float slant);
float TransformScale(float num);
float TransformOriginX(float x);
float TransformOriginY(float y);
float TransformOriginScaleX(float x);
float TransformOriginScaleY(float y);
void Transform3Dto2D(float &x, float &y, float z);
private:
int scale;
float radius, stepPhi, stepTheta, slant, transformOriginX, transformOriginY;
引入数学函数库
#include <math.h>
定义π
#ifndef PI
#define PI 3.14159
#endif // !PI
在构造函数初始化
CGraphicsExercise3DView::CGraphicsExercise3DView()
{
// TODO: 在此处添加构造代码
// 设置斜二测视图倾斜角度(弧度制)
SetSlantRadian(PI / 4);
// 设置规模比例
SetScale(70);
// 设置坐标系在x、y方向的位移(不改变规模情况下,即移动像素)
SetTransformOrigin(300, 350);
// 设置球面半径radius、取样步长stepPhi、stepTheta
SetPlotSphere(2.0, 0.01, 0.1);
}
设置初始化参数的Set函数
// 设置规模
void CGraphicsExercise3DView::SetScale(int scale)
{
this->scale = scale;
}
// 设置坐标系原点在x、y方向的位移(不改变规模情况下,即移动像素)
void CGraphicsExercise3DView::SetTransformOrigin(float transformOriginX, float transformOriginY)
{
this->transformOriginX = transformOriginX;
this->transformOriginY = transformOriginY;
}
// 设置球面半径radius、取样步长stepPhi、stepTheta
void CGraphicsExercise3DView::SetPlotSphere(float radius, float stepPhi, float stepTheta)
{
this->radius = radius;
this->stepPhi = stepPhi;
this->stepTheta = stepTheta;
}
// 设置斜二测视图的倾斜角(单位弧度)
void CGraphicsExercise3DView::SetSlantRadian(float slant)
{
this->slant = slant;
}
坐标及规模变换
// 变换规模
float CGraphicsExercise3DView::TransformScale(float num)
{
return num * scale;
}
// 坐标系X轴方向位移
float CGraphicsExercise3DView::TransformOriginX(float x)
{
return x + transformOriginX / scale;
}
// 坐标系y轴方向位移
float CGraphicsExercise3DView::TransformOriginY(float y)
{
return y - transformOriginY / scale;
}
// 变换坐标系X和规模
float CGraphicsExercise3DView::TransformOriginScaleX(float x)
{
return TransformScale(TransformOriginX(x));
}
// 变换坐标系Y和规模
float CGraphicsExercise3DView::TransformOriginScaleY(float y)
{
return -TransformScale(TransformOriginY(y));
}
三维坐标转化为二维坐标
// 使用斜二测视图,把三维坐标点转化为二维平面上的点
void CGraphicsExercise3DView::Transform3Dto2D(float &x, float &y, float z)
{
x = x - (z * cos(slant)) / 2;
y = y - (z * sin(slant)) / 2;
}
绘制坐标轴及函数图形
// CGraphicsExercise2View 绘制
void CGraphicsExercise3DView::OnDraw(CDC* pDC)
{
CGraphicsExercise3DDoc* pDoc = GetDocument();
ASSERT_VALID(pDoc);
if (!pDoc)
return;
// TODO: 在此处为本机数据添加绘制代码
float x, y, z;
// -------------------- 绘制坐标系 -------------------------
// 坐标x轴
pDC->MoveTo(TransformOriginScaleX(0), TransformOriginScaleY(0));
pDC->LineTo(TransformOriginScaleX(radius + 2), TransformOriginScaleY(0));
// 坐标y轴
pDC->MoveTo(TransformOriginScaleX(0), TransformOriginScaleY(0));
pDC->LineTo(TransformOriginScaleX(0), TransformOriginScaleY(radius + 2));
// 坐标z轴
x = 0, y = 0;
Transform3Dto2D(x, y, radius + 5);
pDC->MoveTo(TransformOriginScaleX(0), TransformOriginScaleY(0));
pDC->LineTo(TransformOriginScaleX(x), TransformOriginScaleY(y));
// 坐标x轴的箭头
pDC->MoveTo(TransformOriginScaleX(radius + 1.8), TransformOriginScaleY(0.2));
pDC->LineTo(TransformOriginScaleX(radius + 2), TransformOriginScaleY(0));
pDC->LineTo(TransformOriginScaleX(radius + 1.8), TransformOriginScaleY(-0.2));
// 坐标y轴的箭头
pDC->MoveTo(TransformOriginScaleX(-0.2), TransformOriginScaleY(radius + 1.8));
pDC->LineTo(TransformOriginScaleX(0), TransformOriginScaleY(radius + 2));
pDC->LineTo(TransformOriginScaleX(0.2), TransformOriginScaleY(radius + 1.8));
// 坐标z轴的箭头
x = 0, y = 0.2;
Transform3Dto2D(x, y, radius + 5 - 0.2);
pDC->MoveTo(TransformOriginScaleX(x), TransformOriginScaleY(y));
x = 0, y = 0;
Transform3Dto2D(x, y, radius + 5);
pDC->LineTo(TransformOriginScaleX(x), TransformOriginScaleY(y));
x = 0.2, y = 0;
Transform3Dto2D(x, y, radius + 5 - 0.2);
pDC->LineTo(TransformOriginScaleX(x), TransformOriginScaleY(y));
// -------------------- 绘制刻度线 -------------------------
// 绘制x轴刻度线
for (float scaleX = 0.2; scaleX < radius + 1; scaleX += 0.2)
{
pDC->MoveTo((int)TransformOriginScaleX(scaleX), (int)TransformOriginScaleY(0));
pDC->LineTo((int)TransformOriginScaleX(scaleX), (int)TransformOriginScaleY(0.1));
}
// 绘制y轴刻度线
for (float scaleY = 0.2; scaleY <= radius + 1; scaleY += 0.2)
{
pDC->MoveTo((int)TransformOriginScaleX(0), (int)TransformOriginScaleY(scaleY));
pDC->LineTo((int)TransformOriginScaleX(0.1), (int)TransformOriginScaleY(scaleY));
}
// 绘制z轴刻度线
for (float x = 0, y = 0, scaleZ = 0.2; scaleZ <= radius + 4; scaleZ += 0.2, x = 0, y = 0)
{
Transform3Dto2D(x, y, scaleZ);
pDC->MoveTo((int)TransformOriginScaleX(x), (int)TransformOriginScaleY(y));
pDC->LineTo((int)TransformOriginScaleX(x + 0.1), (int)TransformOriginScaleY(y));
}
// -------------------- 绘制文字 -------------------------
// 绘制x轴的x
pDC->TextOutW(TransformOriginScaleX(radius + 1.6), TransformOriginScaleY(-0.2), CString("x"));
// 绘制y轴的y
pDC->TextOutW(TransformOriginScaleX(-0.2), TransformOriginScaleY(radius + 1.6), CString("y"));
// 绘制z轴的z
x = 0.2, y = 0;
Transform3Dto2D(x, y, radius + 5 - 0.4);
pDC->TextOutW(TransformOriginScaleX(x), TransformOriginScaleY(y), CString("z"));
CString s;
// 绘制x轴刻度文字
for (float ScaleTextX = 0.4; ScaleTextX < radius + 1; ScaleTextX += 0.4)
{
s.Format(_T("%.1f"), ScaleTextX);
pDC->TextOutW(TransformOriginScaleX(ScaleTextX - 0.1), TransformOriginScaleY(-0.1), s);
}
// 绘制y轴刻度文字
for (float ScaleTextY = 0.4; ScaleTextY <= radius + 1; ScaleTextY += 0.4)
{
s.Format(_T("%.1f"), ScaleTextY);
pDC->TextOutW(TransformOriginScaleX(-0.4), TransformOriginScaleY(ScaleTextY + 0.1), s);
}
// 绘制z轴刻度文字
for (float ScaleTextZ = 0.6; ScaleTextZ <= radius + 4; ScaleTextZ += 0.6)
{
s.Format(_T("%.1f"), ScaleTextZ);
x = 0, y = 0;
Transform3Dto2D(x, y, ScaleTextZ);
pDC->TextOutW(TransformOriginScaleX(x + 0.15), TransformOriginScaleY(y + 0.12), s);
}
// 绘制函数图的Title
x = 0, y = 0;
Transform3Dto2D(x, y, radius + 5);
pDC->TextOutW(TransformOriginScaleX(x + 3), TransformOriginScaleY(y), CString("x^2 + y^2 + z^2 = r^2"));
// -------------------- 绘制函数 -------------------------
// 球面
float phi, theta;
for (phi = 0; phi < 2 * PI; phi += stepPhi)
{
for (theta = 0; theta < PI; theta += stepTheta)
{
x = radius * sin(phi) * cos(theta);
y = radius * sin(phi) * sin(theta);
z = radius * cos(phi);
Transform3Dto2D(x, y, z);
srand(z);
pDC->SetPixel(TransformOriginScaleX(x), TransformOriginScaleY(y), RGB(rand() % 255, rand() % 255, rand() % 255));
}
}
//// 三棱锥(测试用)
//x = 1, y = 0, z = 0;
//Transform3Dto2D(x, y, z);
//pDC->MoveTo((int)TransformOriginScaleX(x), (int)TransformOriginScaleY(y));
//x = 0, y = 1, z = 0;
//Transform3Dto2D(x, y, z);
//pDC->LineTo((int)TransformOriginScaleX(x), (int)TransformOriginScaleY(y));
//x = 0, y = 0, z = 1;
//Transform3Dto2D(x, y, z);
//pDC->LineTo((int)TransformOriginScaleX(x), (int)TransformOriginScaleY(y));
//x = 1, y = 0, z = 0;
//Transform3Dto2D(x, y, z);
//pDC->LineTo((int)TransformOriginScaleX(x), (int)TransformOriginScaleY(y));
}