Did not receive data since 5 seconds! #189
Comments
|
What is your launch file or command line used? "base_link" is the default cheers, |
|
I have also the same problem. I started to create a stereo system with two cameras, but I've also got the same warning messages. I'm afraid about we can not fix the problem, and I should to use a real stereo camera and a frame grabber, shame. |
|
Hi @TothMateGit I fixed the problem as I was not producing proper tf's for the base_link. Make sure that you publish tf's for right and left camera as child, stereo_camera as parent. And connect stereo_camera tf to base_link. I hope it helps. |
|
Yes, the problem is the bad tf generation and tf tree, tf connection between the nodes and topics. We found the solution to fix this issue as well, if you want more information about the solution please check the following links: |
|
I am not sure whether my issue is the same. I post my issue here because it seems related and this issue is not yet closed. I am using realsense RS200 (driver: https://github.com/SyrianSpock/realsense_gazebo_plugin) as my RGBD camera in Gazebo simulator. I was trying to map the color and depth from RS200 in the Gazebo to RTAB-MAP, but I got this warning when I run my rtabmap launch file. I also read this #181 but got not much help from it. Here is the result I run I provide my rtabmap launch file here. I changed the value of frame_id to Snapshots of Gazebo:
Snapshots of Rivz: Rviz shows nothing when I subscribe to Would someone point out where did I get wrong? Thanks! |



|
Did you check if the camera_info is also published? |
|
Hmm, it seems that camera_info is also published. |
|
What is rgbd_odometry telling? The other topic is /rtabmap/odom, maybe odometry is lost |
|
Yes, you are right. There is no Here is the result of As I subscribe some topic from |
|
Can you post the launch file you are using? It seems you don't have any nodes publishing odometry. |
|
I am using the launch files from realsense_gazebo_plugin
Here is what I do:
Some warnings and errors are shown here, but I think they are minor.
Here is the snapshot of rviz. |

|
Can you check: If there is no depth image, you would have to reconstruct one from the point cloud. To do that: cheers, |
|
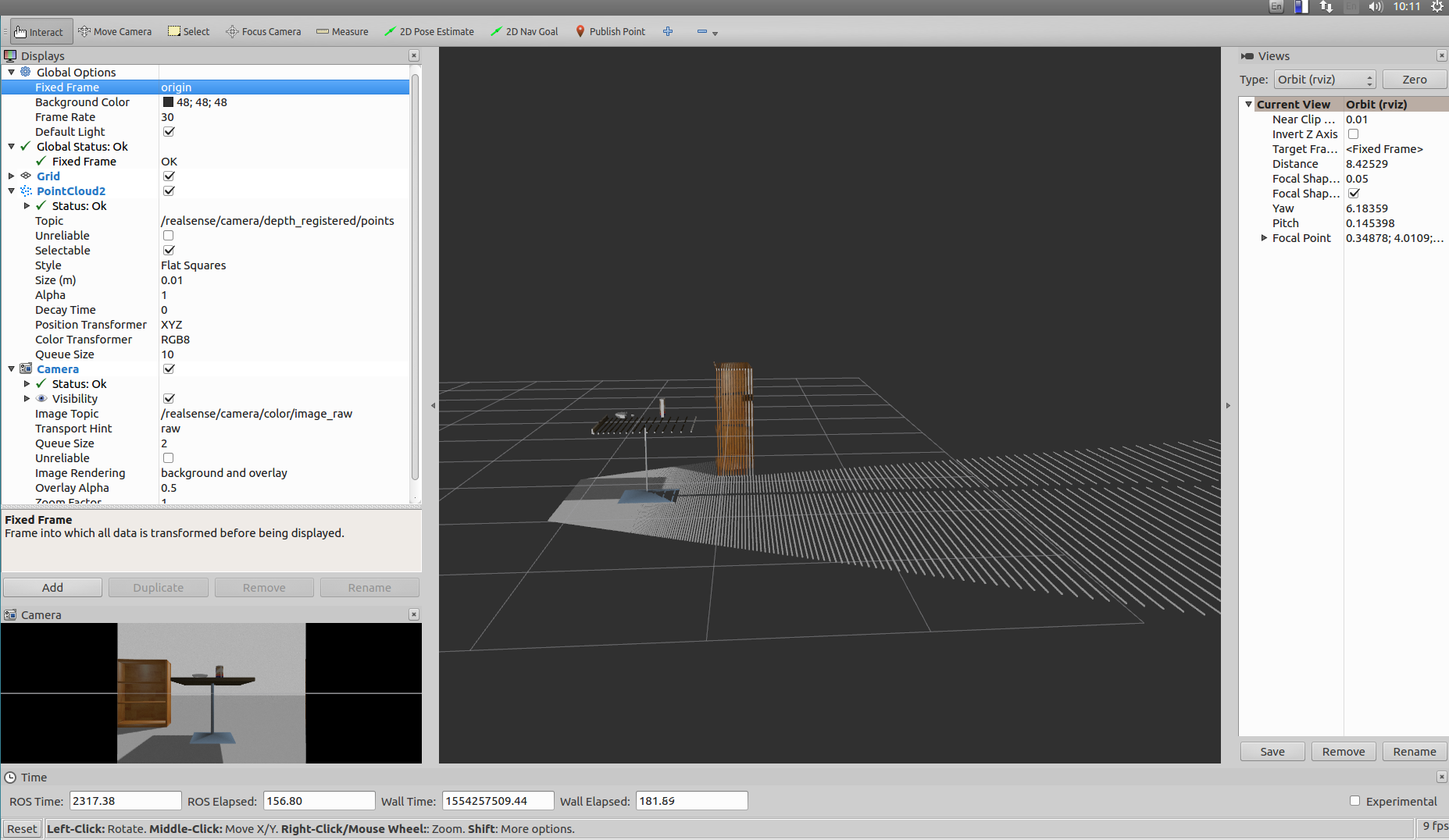
Hmm... I also checked the depth image. There was the result when I ran I can subscribe to the depth image topic and visualize the depth map in Rviz. Here is the snapshot, lower left is the depth map: Besides, I also tried to start from turtlebot and modified Warnings from turtlebot |

|
I just realized in the previous post that you launched only <node name="rtabmap" pkg="rgbd_odometry" type="rgbd_odometry" output="screen">
<param name="frame_id" type="string" value="origin"/>
<param name="approx_sync" type="bool" value="false"/>
<remap from="rgb/image" to="/realsense/camera/color/image_raw"/>
<remap from="depth/image" to="/realsense/camera/depth/image_raw"/>
<remap from="rgb/camera_info" to="/realsense/camera/color/camera_info"/>
</node>
In your last message, you are using the /odom topic as odometry, make sure it is published from the kuboki. cheers, |
|
It works for me. Thanks for catching the bug. Here is the output |

|
@matlabbe Thank you for your help so far! Also, I checked the turtlebot project again and followed your suggestion. As you suggested, I found rtab-map using the /odom topic as odometry published from the kuboki (from the imu and sensor defined in kobuki_gazebo.urdf.xacro) [reference]. I tried to switch the rtab-map odometry from the However, the odometry seems failed to be calculated from rgbd images due to not enough inliners from realsense r200 camera. How do I fix this? Thanks. |
|
Visual odometry won't work well in that kind of simulated environment (not a lot of discriminative visual features). I suggest to stick with kuboki odometry. |
|
@matlabbe |
Hi all,
I have no success to run rtabmap with my two webcams stereo setup camera.
here my rqt_graph
and the warning mesage with approx_sync:=false
if I make it approx_sync:=true here the error:
I also attached the aoutput of the tf view_frames with approx_sync:=false .
frames.pdf
Can anyone help me to solve the problem please?
Thanks
The text was updated successfully, but these errors were encountered: