-
-
Place your images under
$INDIR -
Run the following command, which will automatically read the focal lengths of images under
$INDIRand createfocal_length.csvcd code python3 read_focal_length.py $INDIR # E.g., # python3 read_focal_length.py ../data/home
-
-
- Command
cd code python main.py [--indir $INDIR] [--desc $descriptor_type] [--blend $blending_ratio] [--e2e] [--save] [--cache] # E.g., # python3 main.py --indir ../data/parrington --desc mops --cache
- Command-line Arguments
--indir: Default to be ../data/home. --desc: Default to be sift, choices=['sift', 'mops'] --blend: Default to be 0.1. Ratio of overlapped region to be blended. --e2e: Flag that specifies whether the images are taken end-to-end. If enabled, the first image is concatenated to the end. --save: Flag to determine whether to save the stitched image. If enabled, the stitched image will be saved to '../panorama.png'. If not enabled, the panorama will be displayed in a pop-up window. --cache: Flag to specify whether to read preprocessed (cylindrical projected) images from cache. If enabled, read images from cahce_dir 'cy_{dataset}'.
- Command
- Given the image coordinates
$(x,y)$ , the corresponding cylindrical coordinates$(x', y')$ mapped on a flat image is:$$(s\theta, sh) \text{, where } \theta = tan^{-1} \frac{x}{f} \text{, } h=\frac{y}{\sqrt{x^2+f^2}} $$
-
Harris corner detector
- For each pixel, compute
$R = detM-k(traceM)^2$ for the intensity changes.$M$ is as the follows, where$I_x$ and$I_y$ are the derivatives of image with respect to x and y-axis and$G_{\sigma=5}$ is a 3x3 gaussian kernal
- For each pixel, compute
- Non-maximum suppression is applied to
$R$ - To accelerate the process, we use a boolean mask
(R == cv2.dilate(R, np.ones((3, 3)))), where True values represent unchanged pixels after a 3x3 dilation, indicating local maxima (considered keypoint) in the original response.
- To accelerate the process, we use a boolean mask
-
We've implemented the descriptors of MOPs (refer to MSOP in the slide) and SIFT
-
MOPs descriptor
- reference and method
- Consider a 40x40 square window around the keypoint, scale it to 1/5 size, rotate it to horizontal, and sample a 8x8 patch centered at the keypoint.
- We achieve this by applying an affine matrix
$M=M_{\text{translate(4, 4)}} \ M_{scale} \ M_{rotate} \ M_{\text{translate2origin}}$ and clip the 8x8 patch from the origin.
- We achieve this by applying an affine matrix
- Do intensity normalization to the patch
-
SIFT descriptor
- reference
- Break the 16x16 subpatch surrounding a keypoint into 4x4 blocks.
- In each block, gradients are accumulated into a 8-bin histogram based on gradient orientation
$\theta$ - We adjust
$\theta$ relative to the orientation of the keypoint.
- We adjust
- Gradients contribute to bins based on their magnitude weighted by a Gaussian.
- After normalization the 8x4x4-dim feature vector, clamp gradients > 0.2 to avoid excessive influence of high gradients
-
Brute-force
- Calculate the distance matrix to determine pairwise square root distances between keypoints.
- Additionaly, we apply ratio test to the matches. If
$\frac{L_2(\text{best match})}{L_2(\text{second-best match})} < 0.75$ , the match is considered good
-
- For each iteration, randomly selected 6 keypoints and compute their mean shift.
- If the mean shift yields the most number of inliers, update the best shift estimate to be the mean shifts of these inliers.
- We evenly distribute the accumulated drift in the y-direction across all images.
- linear blending
- Within the overlapped region of two images, blend the images horizontally by varying
$\alpha$ from 1 to 0$$I_{blended} = \alpha I_{new} + (1-\alpha) I_{prev} $$
- Within the overlapped region of two images, blend the images horizontally by varying
-
Feature Matching
-
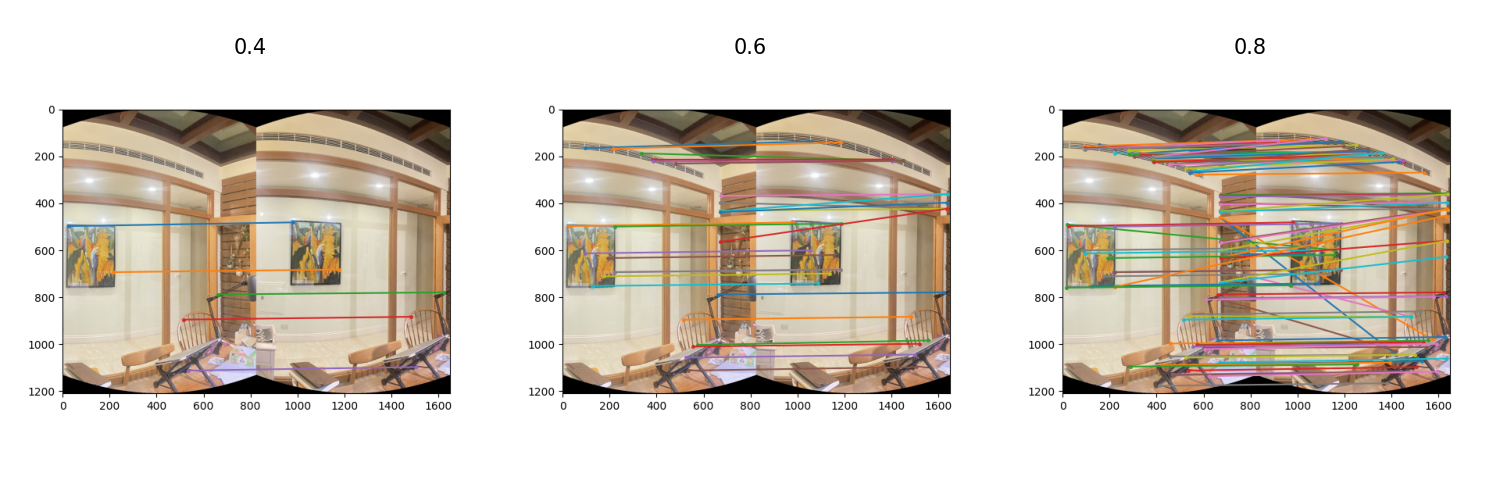
Ratio Test
- Specify
$t$ such that$\frac{d_1}{d_2} < t$ , where$d_1$ and$d_2$ are the nearest and second nearest distance to the query keypoint - Lower
$t$ gives clearer but fewer matches; higher$t$ gives more but ambiguous matches. Thus, there's a balance between match quality and quantity. - We set t=0.8 to maximize the number of points. However, this comes with a trade-off: more iterations of RANSAC during image alignment is required.

- Specify
-
-
Image Alignment
- Let blend ratio = 0 for a clear view, and consider shifts in y

- Let blend ratio = 0 for a clear view, and consider shifts in y
-
End-to-end alignment
- Note that the overflow pixels are appeared at the top/bottom since we use np.roll

- Note that the overflow pixels are appeared at the top/bottom since we use np.roll
-
Blending
-
blending ratio
- Setting blending ratio to 0 means that there is no blending, while setting blending ratio to 1.0 means full blending within the overlapped region.
- Though higher blending percentages seam the images smoother, there is a trade-off with potential ghosting effects.


-




-
-
- Append the first image to the end




{kind=link}