Source ros noetic (do this in every terminal):
source /opt/ros/noetic/setup.bash
Go to your workspace directory and source it (do this in every terminal):
-
cd ~/{workspace_dir} -
source devel/setup.bash
Then run the following launch files:
- (Terminal 1)
roslaunch turtlebot3_gazebo turtlebot3_world.launch - (Terminal 2)
roslaunch turtlebot3_navigation turtlebot3_navigation.launch
First you need to click on the "2D Pose Estimate" button on rviz, so the robot knows its current position on the map. It should look like this:
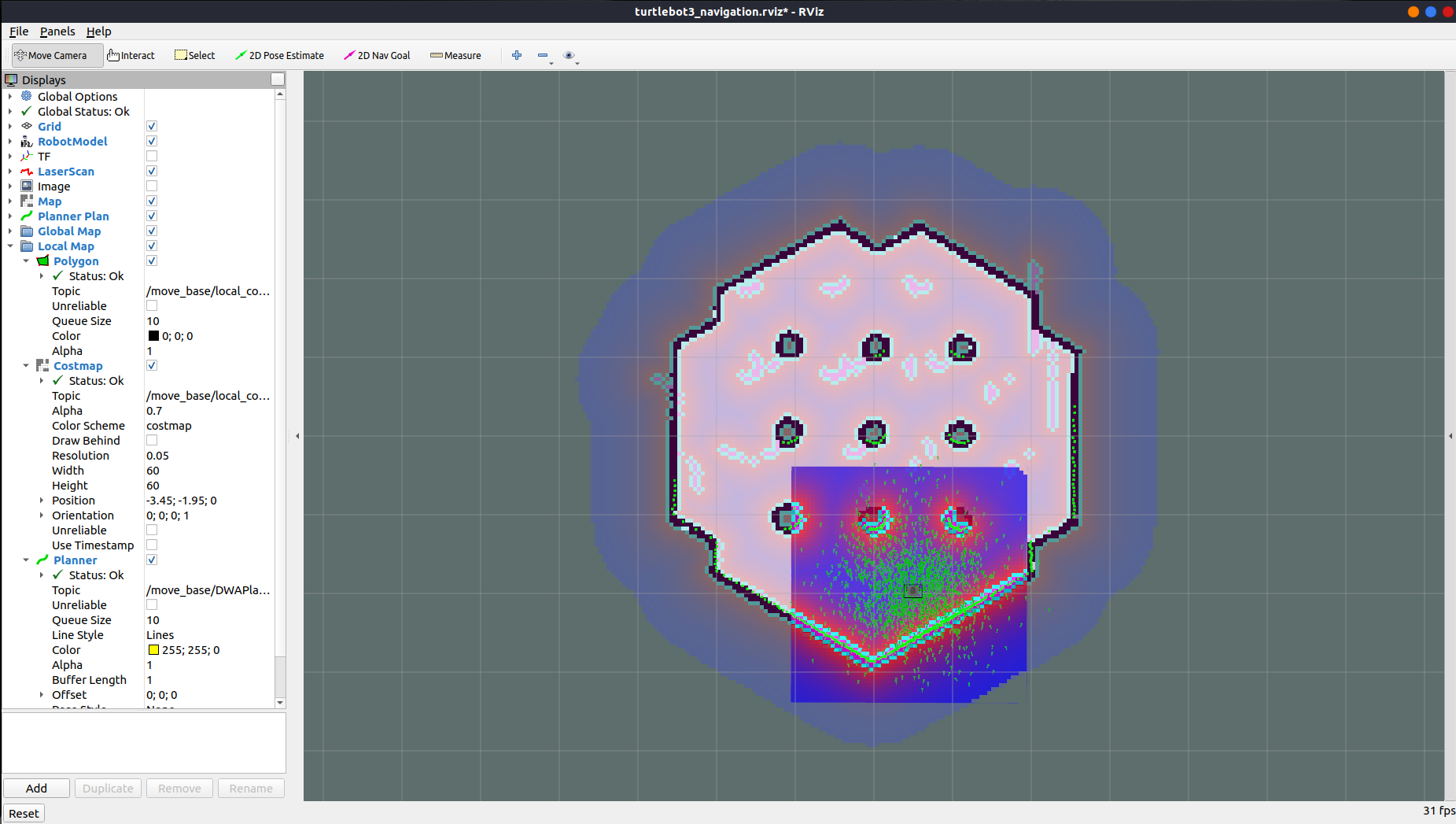
-
(Terminal 3) Go to the build directory:
cd ~/thesis_ws/src/Groot/build && ./Groot -
(Terminal 4)
roslaunch bt_nav_actions node.bt_nav_move_base.launch
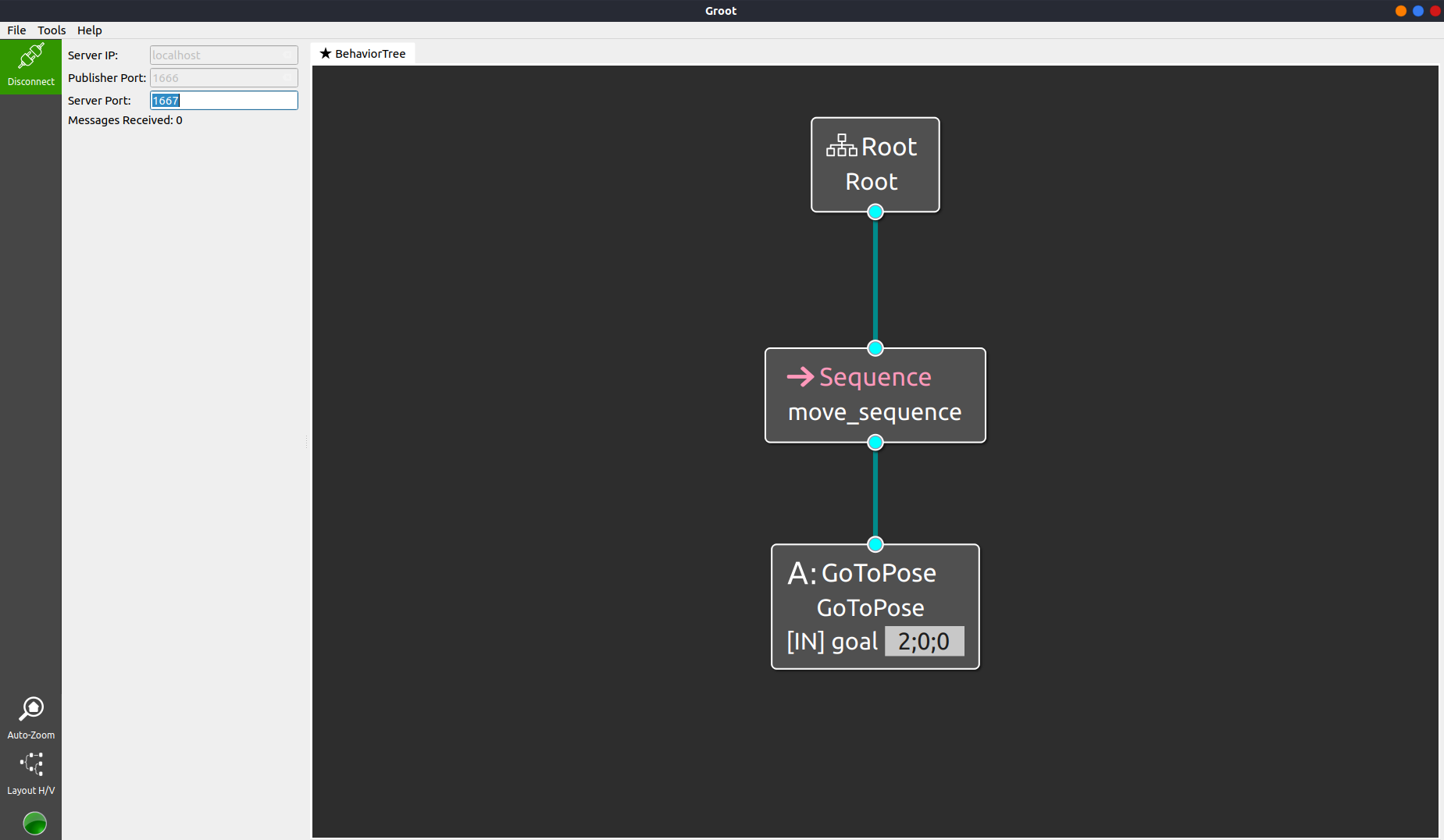
On Groot, go to monitor mode and click "Connect". You should see the following behavior tree (you have 10 seconds to do that, otherwise the node would start and you won't see anything):