Use the turtlebot simulator (state) to learn short path algorithm.

Every thing work inside the following given docker image
Prepare your terminal (X11 redirection)
xhost +
Start the container (ros humble)
sudo docker run -it -p 2222:22 --name global_planner -e DISPLAY=$DISPLAY -v /tmp/.X11-unix:/tmp/.X11-unix registry.gitlab.com/js-ros-training/ros-training-docker-public/ros-humble-desktop-stage:v2
On the opened container terminal load env:
source /opt/ros/humble/setup.bash
cd /home/tp/ros_ws/
source install/setup.bash
Start stage simulator :
ros2 run stage_ros stageros src/stage_ros2/world/maze.world
for all next ros2 command , open another terminal on the started container:
xhost + sudo docker exec -it <container ID> /bin/bashload env:
source /opt/ros/humble/setup.bash cd /home/tp/ros_ws/ source install/setup.bash
(New container terminal) Start navigation for stage simulator :
ros2 launch stage_ros robot_launch.py nav:=true
(New container terminal) Start map_sever :
ros2 run nav2_util lifecycle_bringup map_server
(New container terminal) Launch the custom short path computation
cd /home/tp/ros_ws/src
git clone https://github.com/jacques-saraydaryan/global_planner_short_path_student.git
cd /home/tp/ros_ws
colcon build --packages-select global_planner_short_path_student
source install/setup.bash
ros2 run global_planner_short_path_student ShortPathMng
On the rviz panel click on the publish point button to select a goal on the map. Your algorithm begins
Parameters can be modified into the ShortPathMng.py file :
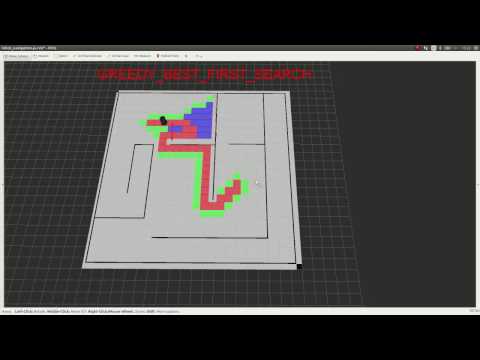
def __init__(self, resolution=8, shortPathMethod='GREEDY_BEST_FIRST_SEARCH', isLocalPlanner=False,
inflate_radius=0.3):
...-
Define the grid resolution (caution large grid lead to long processing...)
resolution=8 -
Define the default short path method
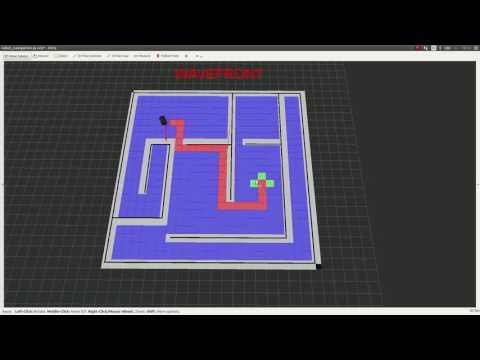
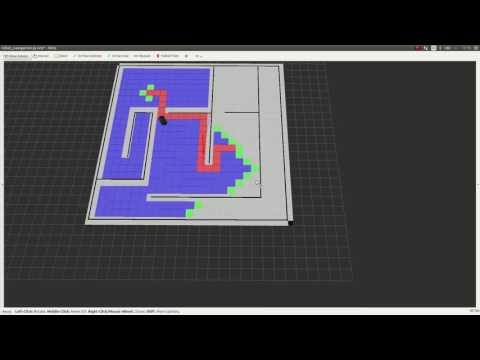
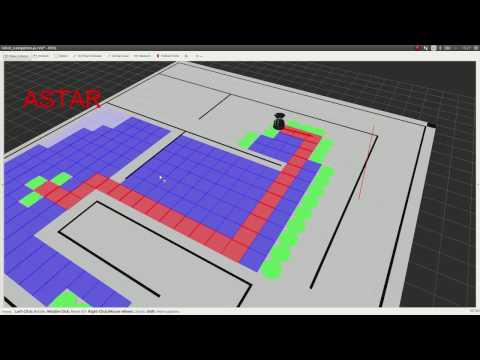
shortPathMethod='GREEDY_BEST_FIRST_SEARCH'(possible 'WAVEFRONT', 'ASTAR', 'DIJKSTRA', 'GREEDY_BEST_FIRST_SEARCH') -
Activate custom local planner or not:
isLocalPlanner=False -
Define the inflate radius of obstacles
inflate_radius=0.3
1 Inflate the obstacles of your map according to the robot radius and the grid resolution
# **************************************************
# *************** INFLATE MAP *****************
# **************************************************
def inflate_map(self,map,map_resolution):
new_inflated_map=""
### TODO
### map :original map ( like a grid[][] )
### map_resolution :original map resolution (e.g 0.05)
###
### self.inflate_radius : radius of obstacle inflate (0.3 m)
### self.MAP_OBSTACLE_VALUE : value into the map of an obstacle (-100)
#
#
#
#
# TODO
#
#
#
#
###
return map
## UNCOMMENT LINE BELLOW TO TEST YOUR INFLATED MAP
# return new_inflated_map2 Complete the files Dijkstra.py to add the Dijkstra short path algorithm
class Dijsktra(AbstractShortPath):
def __init__(self):
print('')
def goto(self, source, target, matrix, pub_marker, marker_container):
prev = {}
### TODO
###########################################################
################### Function Paramters ###################
###########################################################
### source: coordinate of the robot position source['x'] return the x position, source['y'] return the y position
###
### target: coordinate of the target position target['x'] return the x position, target['y'] return the y position
###
### matrix: rescaled map (including obstacles) matrix[i][j] return the value of the cell i,j of the matrix
###
### elf.MAP_OBSTACLE_VALUE: value of an obstacle into the matrix (-100)
###
### pub_marker: marker publisher to visualize information into rviz (usage pub_marker.publish(marker_container) )
###
### marker_container: marker container where where new marker are added as point
###
###########################################################
################### Function Toolboxes ###################
###########################################################
# # create a visual information
# self.createFontierUnitMarker(v, marker_container)
#
# # publish visual information
# pub_marker.publish(marker_container)
#
# # create a visual information
# self.createClosedMarker(u, marker_container)
#
#
#
#
#
#
# TODO
#
#
#
#
#
#
###
### prev: disctionary holding node precedence
### CAUTION prev dictionary has to be completed as follow:
###
### prev[str(v['x']) + '_' + str(v['y'])] = str(u['x']) + '_' + str(u['y'])
###
### where v['x'] return the x position of the node v in the resized map
### where v['y'] return the y position of the node v in the resized map
return prev3 Complete the files AStar.py to add the AStar short path algorithm
class AStar(AbstractShortPath):
def __init__(self):
print('')
def goto(self, source, target, matrix, pub_marker, marker_container):
prev = {}
### TODO
###########################################################
################### Function Paramters ###################
###########################################################
### source: coordinate of the robot position source['x'] return the x position, source['y'] return the y position
###
### target: coordinate of the target position target['x'] return the x position, target['y'] return the y position
###
### matrix: rescaled map (including obstacles) matrix[i][j] return the value of the cell i,j of the matrix
###
### elf.MAP_OBSTACLE_VALUE: value of an obstacle into the matrix (-100)
###
### pub_marker: marker publisher to visualize information into rviz (usage pub_marker.publish(marker_container) )
###
### marker_container: marker container where where new marker are added as point
###
###########################################################
################### Function Toolboxes ###################
###########################################################
# # create a visual information
# self.createFontierUnitMarker(v, marker_container)
#
# # publish visual information
# pub_marker.publish(marker_containers)
#
# # create a visual information
# self.createClosedMarker(u, marker_container)
#
#
#
#
#
#
# TODO
#
#
#
#
#
#
###
### prev: disctionary holding node precedence
### CAUTION prev dictionary has to be completed as follow:
###
### prev[str(v['x']) + '_' + str(v['y'])] = str(u['x']) + '_' + str(u['y'])
###
### where v['x'] return the x position of the node v in the resized map
### where v['y'] return the y position of the node v in the resized map
return prev4 Link your global planner to your local planner
def __init__(self, resolution, shortPathMethod,isLocalPlanner,inflate_radius):
...
# ------------------#
# ---- Service -----#
# ------------------#
self.local_planner_service =""
### TODO
### create the link between our navigation ros node and our local_planner
### self.local_planner_service: service container to call the local_planner node
###
#
#
#
#
# TODO
#
#
#
#
###
...5 Complete in the case of using your local planner
def pushGoals(self,mapNode,start,markerArray,isreverted,isPathOnService):
...
if isPathOnService:
### TODO
### call here the local planner service (self.local_planner_service)
### goalQueue: queue of goal to acheive (Posestamped ros message)
###
### self.local_planner_service: service to call the local planner ( TODO need to be created on the ShortPathMng constructor)
#
#
#
#
# TODO
#
#
#
#
###
print''| Behavior | Result |
|---|---|
 |
 |
| Behavior | Result |
|---|---|
 |
 |
| Behavior | Result |
|---|---|
 |
 |
| Behavior | Result |
|---|---|
 |
 |