My solution to the Udacity Self-Driving Car Engineer Nanodegree Behavioral Cloning project.
Note: This project makes use of a Udacity-developed driving simulator and training data collected from the simulator (neither of which is included in this repo).
Additional Note: this repo is for reference/historical purposes only and should be considered unusable.
The object of this project is to apply deep learning principles to effectively teach a car to drive autonomously in a simulated driving application. The simulator includes both training and autonomous modes, and two tracks on which the car can be driven - I will refer to these as the "test track" (which is the track from which training data is collected and on which the output is evaluated for project credit) and the "challenge track" (which includes hills, tight turns, and other features not included in the test track).
In training mode, user generated driving data is collected in the form of simulated car dashboard camera images and control data (steering angle, throttle, brake, speed). Using the Keras deep learning framework, a convolutional neural network (CNN) model is produced using the collected driving data (see model.py) and saved as model.json (with CNN weights saved as model.h5).
Using the saved model, drive.py (provided by Udacity, but amended slightly to ensure compatibility with the CNN model and to fine tune controls) starts up a local server to control the simulator in autonomous mode. The command to run the server is python drive.py model.json; the model weights are retrieved using the same name but with the extension .h5 (i.e. model.h5).
The challenge of this project is not only developing a CNN model that is able to drive the car around the test track without leaving the track boundary, but also feeding training data to the CNN in a way that allows the model to generalize well enough to drive in an environment it has not yet encountered (i.e. the challenge track).
The project instructions from Udacity suggest starting from a known self-driving car model and provided a link to the nVidia model (and later in the student forum, the comma.ai model) - the diagram below is a depiction of the nVidia model architecture.

First I reproduced this model as depicted in the image - including image normalization using a Keras Lambda function, with three 5x5 convolution layers, two 3x3 convolution layers, and three fully-connected layers - and as described in the paper text - including converting from RGB to YUV color space, and 2x2 striding on the 5x5 convolutional layers. The paper does not mention any sort of activation function or means of mitigating overfitting, so I began with tanh activation functions on each fully-connected layer, and dropout (with a keep probability of 0.5) between the two sets of convolution layers and after the first fully-connected layer. The Adam optimizer was chosen with default parameters and the chosen loss function was mean squared error (MSE). The final layer (depicted as "output" in the diagram) is a fully-connected layer with a single neuron. [model.py lines 268-329]
Udacity provides a dataset that can be used alone to produce a working model. However, students are encouraged (and let's admit, it's more fun) to collect our own. Particularly, Udacity encourages including "recovery" data while training. This means that data should be captured starting from the point of approaching the edge of the track (perhaps nearly missing a turn and almost driving off the track) and recording the process of steering the car back toward the center of the track to give the model a chance to learn recovery behavior. It's easy enough for experienced humans to drive the car reliably around the track, but if the model has never experienced being too close to the edge and then finds itself in just that situation it won't know how to react.
In training mode, the simulator produces three images per frame while recording corresponding to left-, right-, and center-mounted cameras, each giving a different perspective of the track ahead. The simulator also produces a csv file which includes file paths for each of these images, along with the associated steering angle, throttle, brake, and speed for each frame. My algorithm loads the file paths for all three camera views for each frame, along with the angle (adjusted by +0.25 for the left frame and -0.25 for the right), into two numpy arrays image_paths and angles. [model.py lines 174-211]
Images produced by the simulator in training mode are 320x160, and therefore require preprocessing prior to being fed to the CNN because it expects input images to be size 200x66. To achieve this, the bottom 20 pixels and the top 35 pixels (although this number later changed) are cropped from the image and it is then resized to 200x66. A subtle Gaussian blur is also applied and the color space is converted from RGB to YUV. Because drive.py uses the same CNN model to predict steering angles in real time, it requires the same image preprocessing (Note, however: using cv2.imread, as model.py does, reads images in BGR, while images received by drive.py from the simulator are RGB, and thus require different color space conversion). All of this is accomplished by methods called preprocess_image in both model.py and drive.py. [model.py lines 68-87]
To minimize the model's tendency to overfit to the conditions of the test track, images are "jittered" before being fed to the CNN. The jittering (implemented using the method random_distort) consists of a randomized brightness adjustment, a randomized shadow, and a randomized horizon shift. The shadow effect is simply a darkening of a random rectangular portion of the image, starting at either the left or right edge and spanning the height of the image. The horizon shift applies a perspective transform beginning at the horizon line (at roughly 2/5 of the height) and shifting it up or down randomly by up to 1/8 of the image height. The horizon shift is meant to mimic the hilly conditions of the challenge track. The effects of the jitter can be observed in the sample below. [model.py lines 89-118]

An important step in producing data for the model, especially when preprocessing (and even more so when applying any sort of augmentation or jitter) the data, is to visualize it. This acts as a sort of sanity check to verify that the preprocessing is not fundamentally flawed. Flawed data will almost certainly act to confuse the model and result in unacceptable performance. For this reason, I included a method 'visualize_dataset', which accepts a numpy array of images X, a numpy array of floats y (steering angle labels), and an optional numpy array of floats y_pred (steering angle predictions from the model). This method calls process_img_for_visualization for each image and label in the arrays. [model.py lines 57-66]
The process_img_for_visualization method accepts an image input, float angle, float pred_angle, and integer frame, and it returns an annotated image ready for display. It is used by the visualize_dataset method to format an image prior to displaying. It converts the image colorspace from YUV back to the original BGR, applies text to the image representing the steering angle and frame number (within the batch to be visualized), and applies lines representing the steering angle and the model-predicted steering angle (if available) to the image. [model.py lines 40-55]
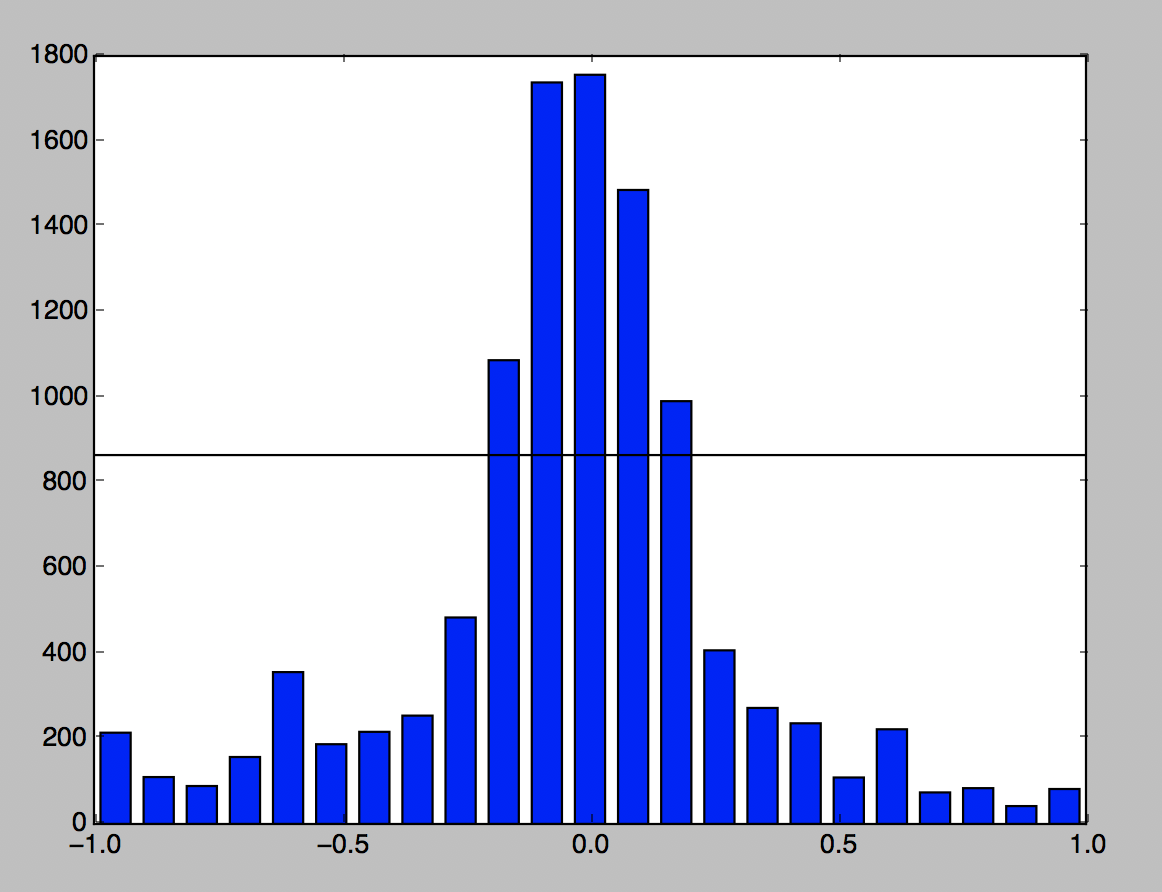
Because the test track includes long sections with very slight or no curvature, the data captured from it tends to be heavily skewed toward low and zero turning angles. This creates a problem for the neural network, which then becomes biased toward driving in a straight line and can become easily confused by sharp turns. The distribution of the input data can be observed below, the black line represents what would be a uniform distribution of the data points.

To reduce the occurrence of low and zero angle data points, I first chose a number of bins (I decided upon 23) and produced a histogram of the turning angles using numpy.histogram. I also computed the average number of samples per bin (avg_samples_per_bin - what would be a uniform distribution) and plotted them together. Next, I determined a "keep probability" (keep_prob) for the samples belonging to each bin. That keep probability is 1.0 for bins that contain less than avg_samples_per_bin, and for other bins the keep probability is calculated to be the number of samples for that bin divided by avg_samples_per_bin (for example, if a bin contains twice the average number of data points its keep probability will be 0.5). Finally, I removed random data points from the data set with a frequency of (1 - keep_prob). [model.py lines 215-248]
The resulting data distribution can be seen in the chart below. The distribution is not uniform overall, but it is much closer to uniform for lower and zero turning angles.

After implementing the above strategies, the resulting model performed very well - driving reliably around the test track multiple times. It also navigated the challenge track quite well, until it encountered an especially sharp turn. The following strategies were adopted primarily to improve the model enough to drive the length of the challenge track, although not all of the them contributed to that goal directly.
When working with datasets that have a large memory footprint (large quantities of image data, in particular) Keras python generators are a convenient way to load the dataset one batch at a time rather than loading it all at once. Although this was not a problem for my implementation, because the project rubric made mention of it I felt compelled to give it a try.
The generator generate_training_data accepts as parameters a numpy array of strings image_paths, a numpy array of floats angles, an integer batch_size (default of 128), and a boolean validation_flag (default of False). Loading the numpy arrays image_paths (string) and angles (float) from the csv file, as well as adjusting the data distribution (see "Data Distribution Flattening," above) and splitting the data into training and test sets, is still done in the main program.
generate_training_data shuffles image_paths and angles, and for each pair it reads the image referred to by the path using cv2.imread. It then calls preprocess_image and random_distort (if validation_flag is False) to preprocess and jitter the image. If the magnitude of the steering angle is greater than 0.33, another image is produced which is the mirror image of the original using cv2.flip and the angle is inverted - this helps to reduce bias toward low and zero turning angles, as well as balance out the instance of higher angles in each direction so neither left nor right turning angles become overrepresented. Each of the produced images and corresponding angles is added to a list and when the lengths of the lists reach batch_size the lists are converted to numpy arrays and yielded to the calling generator from the model. Finally, the lists are reset to allow another batch to be built and image_paths and angles are again shuffled. [model.py lines 120-149]
generate_training_data runs continuously, returning batches of image data to the model as it makes requests, but it's important to view the data that is being fed to the model, as mentioned above in "Data Visualization." That's the purpose of the method generate_training_data_for_visualization, which returns a smaller batch of data to the main program for display. (This turned out to be critical, at one point revealing a bug in my implementation of cv2.flip causing the image to be flipped vertically instead of horizontally) [model.py lines 152-168]
Inspired by David Ventimiglia's post (particularly where he says "For instance, if you have a neural network with no memory or anticipatory functions, you might downplay the importance of features within your data that contain information about the future as opposed to features that contain information about the present."), I began exploring more aggressive cropping during the image preprocessing stage. This also required changes to the convolutional layers in the model, resulting in a considerably smaller model footprint with far fewer parameters. Unfortunately, I was not successful implementing this approach (although the reason may have been because of an error in the drive.py image preprocessing), and ultimately returned to the original nVidia model and my original preprocessing scheme.
Another mostly unsuccessful attempt to improve the model's performance was inspired by David Brailovsky's post describing his competition-winning model for identifying traffic signals. In it, he discovered that the model performed especially poorly on certain data points, and then found those data points to be mislabeled in several cases. I created clean.py which leverages parts of both model.py and drive.py to display frames from the dataset on which the model performs the worst. The intent was to manually adjust the steering angles for the mislabeled frames, but this approach was tedious, and often the problem was with the model's prediction and not the label or the ideal ground truth lay somewhere between the two. A sample of the visualization (including ground truth steering angles in green and predicted steering angles in red) is shown below.

Some other strategies implemented to combat overfitting and otherwise attempt to get the car to drive more smoothly are (these were implemented mostly due to consensus from the nanodegree community, and not necessarily all at once):
- Removing dropout layers and adding L2 regularization (
lambdaof 0.001) to all model layers - convolutional and fully-connected - Removing
tanhactivations on fully-connected layers and addingELUactivations to all model layers - convolutional and fully-connected - Adjust learning rate of Adam optimizer to 0.0001 (rather than the default of 0.001)
These strategies did, indeed, result in less bouncing back and forth between the sides of the road, particularly on the test track where the model was most likely to overfit to the recovery data.
One useful tool built into the Keras framework is the ability to use callbacks to perform tasks along the way through the model training process. I chose to implement checkpoints to save the model weights at the end of each epoch. In a more typical application of neural networks, it might make more sense to simply end the learning process once the loss stops improving from one epoch to the next. However, in this application the loss was not an entirely reliable indicator of model performance, so saving model weights at the end of each epoch is something of a buy-one-get-X-free each time the training process runs. In the end, it was the weights from the third epoch of training that performed best and completed both test and challenge tracks.
At one point, I had decided I might be throwing out too much of my data trying to achieve a more uniform distribution. So instead of discarding data points until the distribution for a bin reaches the would-be average for all bins, I made the target twice the would-be average for all bins. The resulting distribution can be seen in the chart below. This resulted in a noticeable bias toward driving straight (i.e. problems with sharp turns), particularly on the challenge track.
The consensus from the nanodegree community was that underperforming on the challenge track most likely meant that there was not a high enough frequency of higher steering angle data points in the set. I once again adjusted the flattening algorithm, setting the target maximum count for each bin to half of the would-be average for all bins. The histogram depicting the results of this adjustment can be seen in the chart below. (Note: the counts for the bins differ from the chart above because the dataset for the chart below includes both Udacity's and my own data.)

These strategies resulted in a model that performed well on both test and challenge tracks. The final dataset was a combination of Udacity's and my own, and included a total of 59,664 data points. From these, only 17,350 remained after distribution flattening, and this set was further split into a training set of 16,482 (95%) data points and a test set of 868 (5%) data points. The validation data for the model is pulled from the training set, but doesn't undergo any jitter. The model architecture is described in the paragraphs above, but reiterated in the image below:

This project - along with most every other exercise in machine learning, it would seem - very much reiterated that it really is all about the data. Making changes to the model rarely seemed to have quite the impact that a change to the fundamental makeup of the training data typically had.
I could easily spend hours upon hours tuning the data and model to perform optimally on both tracks, but to manage my time effectively I chose to conclude my efforts as soon as the model performed satisfactorily on both tracks. I fully plan to revisit this project when time permits.
One way that I would like to improve my implementation is related to the distribution flattening scheme. As it is currently implemented, a very large chunk of data is thrown out, never to be seen again. I find this bothersome, and I feel that wasting data like this (even if it is mostly zero/near-zero steering angles) is a missed opportunity to train a model that can better generalize. In the future, I would like to pass the full dataset (image_paths and angles) to the generator and allow it to flatten the distribution itself, throwing out a different portion of the data each epoch or batch.
I would also like to revisit implementing a more agressive crop to the images before feeding them to the neural net. Another nanodegree student achieved good model performance in a neural net with only 63 parameters. Such a small neural net is desirable because it greatly reduces training time and can produce near real-time predictions, which is very important for a real-world self-driving car application.
I enjoyed this project thoroughly and I'm very pleased with the results. Training the car to drive itself, with relatively little effort and virtually no explicit instruction, was extremely rewarding.