
The goal of the project is to develop an estimator to be used by the controller from the previous project to successfully fly a desired flight path using realistic sensors.
Program and configuration:
C++ program: src/QuadEstimatorEKF.cpp
C++ program: src/QuadControl.cpp
C++ header: src/QuadControl.h
Configuration: config/QuadEstimatorEKF.txt
Configuration: config/QuadControlParams.txt
The following report consists of 3 sections:
01 Implementation
01.1 Sensor noise
01.2 Attitude estimation
01.3 Prediction
01.4 Magnetometer update
01.5 GPS update
02 Flight evaluation
02.1 Sensor noise
02.2 Attitude estimation
02.3 Prediction
02.4 Magnetometer update
02.5 GPS update
03 References
Books, research papers, and tools
Produced 9.27 seconds of data. Read into Excel. Use STDEV() function to calculate standard deviation of measurements. For GPS, the value is 0.723312 and for IMU, 0.490335. With some adjustments and a capture of 32.57s of data, then GPS: 0.6782 IMU: 0.4955. These are close to the simulated settings of 0.7 for GPU and 0.5 for IMU.
[see lines 3-4 in 06_SensorNoise.txt]
According to Quan, "nonlinear complementary filters are based on a nonlinear relationship between the angular velocity and the angle of rotation."
To reduce attitude estimation error, first the attitude estimate is converted to a quaternion, then integrated with the Quaternion class function IntegrateBodyRate(). Finally, it is converted back to Euler angles using the convenience functions Roll(), Pitch(), and Yaw().
[see lines 100-109 in QuadEstimatorEKF.cpp]
Implemented integrate forward, calculate the partial derivative of the body-to-global rotation matrix, and predict the state covariance forward.
[see lines 172-181 in QuadEstimatorEKF.cpp]
[see lines 209-219 in QuadEstimatorEKF.cpp]
[see lines 266-276 in QuadEstimatorEKF.cpp]
Note: in reference paper [2], there is an error in formula 52 on page 9. (I reported this as issue #320 in Waffle.) The code in QuadEstimatorEKF::GetRbgPrime is implemented with the correction (at line 215) to match Diebel[3] equation 71.
Implemented UpdateFromMag to include the magnetometer data into the state. The solution normalizes the difference between the measured and estimated yaw.
[see lines 328-335 in QuadEstimatorEKF.cpp]
Implemented GPS update. hprime is assigned as an identity matrix as in Diebel[3] equation 55.
[see lines 302-305 in QuadEstimatorEKF.cpp]
The calculated standard deviation correctly captures ~68% of the sensor measurements.
Unless otherwise noted, results are from tests made with the supplied controller (described as "relaxed to work with an estimated state").
RESULTS:
Simulation #2 (../config/06_SensorNoise.txt)
PASS: ABS(Quad.GPS.X-Quad.Pos.X) was less than MeasuredStdDev_GPSPosXY for 72% of the time
PASS: ABS(Quad.IMU.AX-0.000000) was less than MeasuredStdDev_AccelXY for 67% of the time
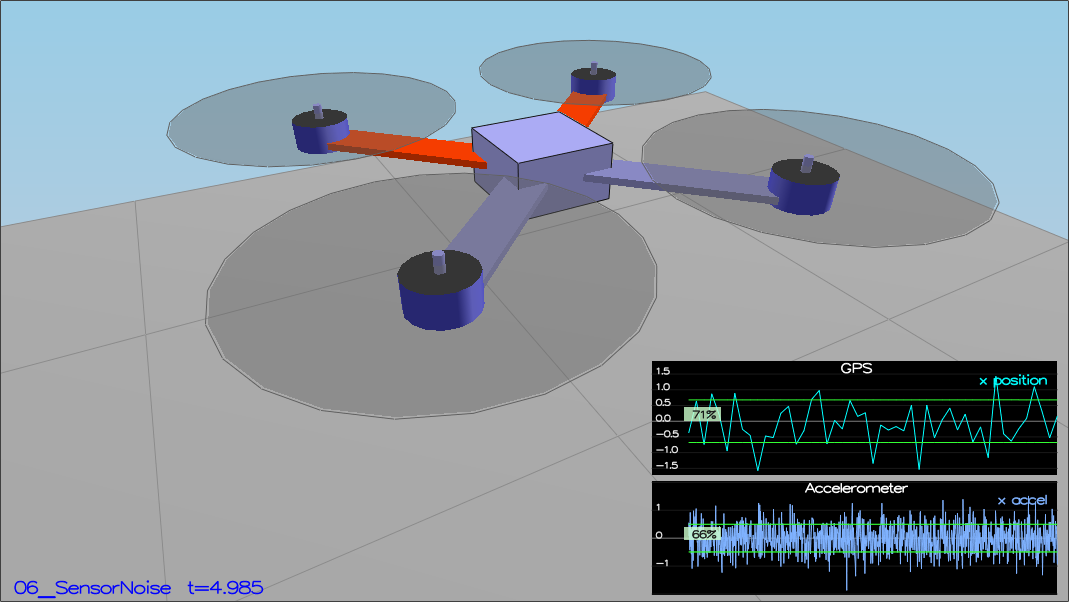
Figure 1: Scenario 6 - measuring standard deviation
RESULTS:
Simulation #5 (../config/07_AttitudeEstimation.txt)
PASS: ABS(Quad.Est.E.MaxEuler) was less than 0.100000 for at least 3.000000 seconds

Figure 2: Scenario 7 - reducing estimated attitude error
Estimator integrates forward to track the actual state.

Figure 3: Scenario 8 - prediction with reasonably slow drift

Figure 4: Scenario 9 - before tuning
Tuning the InitStdDevs and the process noise model brings the errors in range.

Figure 5: Scenario 9 - after tuning in X dimension

Figure 6: Scenario 9 - after tuning in Y dimension

Figure 7: Scenario 9 - after tuning in Z dimension
Maintain an error of less than 0.1 radians in heading for at least 10 seconds.
RESULTS:
Simulation #3 (../config/10_MagUpdate.txt)
PASS: ABS(Quad.Est.E.Yaw) was less than 0.100000 for at least 10.000000 seconds
PASS: ABS(Quad.Est.E.Yaw-0.000000) was less than Quad.Est.S.Yaw for 73% of the time
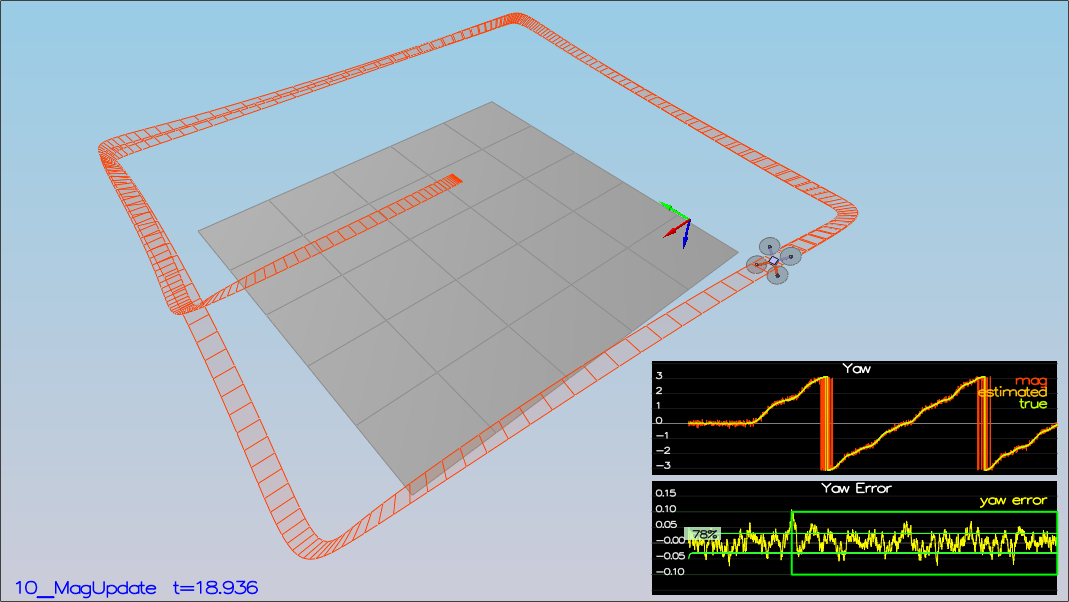
Figure 8: Scenario 10 - magnetometer update
Tuned the GPSPosXYStd and GPSPosZStd values in QuadEstimatorEKF.txt
RESULTS:
Simulation #6 (../config/11_GPSUpdate.txt)
PASS: ABS(Quad.Est.E.Pos) was less than 1.000000 for at least 20.000000 seconds

Figure 9: Scenario 11 - GPS update
NOTE: Results below are from tests made with the controller from the prior project. (Located in: https://github.com/jwdunn1/FCND-Controls-CPP)
Initial testing using the prior project controller (before tuning) was metrically successful (estimated position error of < 1m), however the aggressive tuning causes the path to overshoot the corners of the box trajectory.
RESULTS:
Simulation #4 (../config/11_GPSUpdate.txt)
PASS: ABS(Quad.Est.E.Pos) was less than 1.000000 for at least 20.000000 seconds

Figure 10: Scenario 11 - GPS update pretuning

Figure 11: Scenario 11 - GPS update pretuning (overhead)
To mitigate the overshoots, the position and velocity gains were reduced from the more aggressive initial settings until a box shape is achieved.

Figure 12: Scenario 11 - GPS update tuned

Figure 13: Scenario 11 - GPS update tuned (overhead)
NOTE: The original (more aggressive) controller gains are required for scenarios 3, 4, and 5. Successful passing of these scenarios is not required for this project.
[1] Introduction to Multicopter Design and Control
Quan Quan
Springer Singapore, 2017
[2] Estimation for Quadrotots
Tellex, Brown, and Lupashin
https://www.overleaf.com/read/vymfngphcccj
[3] Representing Attitude: Euler Angles, Unit Quaternions, and Rotation Vectors
James Diebel
https://www.astro.rug.nl/software/kapteyn-beta/_downloads/attitude.pdf
[4] Kalman Tutorial
Simon Levy
https://home.wlu.edu/~levys/kalman_tutorial/
[5] Kalman Filters on Youtube
Michel van Biezen
https://www.youtube.com/playlist?list=PLX2gX-ftPVXU3oUFNATxGXY90AULiqnWT
[6] A New Extension of the Kalman Filter to Nonlinear
Systems
Julier and Uhlmann
https://people.eecs.berkeley.edu/~pabbeel/cs287-fa15/optreadings/JulierUhlmann-UKF.pdf
[7] The Unscented Kalman Filter for Nonlinear Estimation
Wan and van der Merwe
https://www.seas.harvard.edu/courses/cs281/papers/unscented.pdf
[8] A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators
Julier, Uhlmann, and Durrant-Whyte
https://pdfs.semanticscholar.org/76c5/2206888eedef8d8dead3007992e53e3c4ae8.pdf
[9] Python Kalman filter
Daniel Duckworth
https://pykalman.github.io/
[10] Quadcopter Dynamics, Simulation, and Control
Andrew Gibiansky
http://andrew.gibiansky.com/downloads/pdf/Quadcopter%20Dynamics,%20Simulation,%20and%20Control.pdf
[11] Computing Euler angles from a rotation matrix
Gregory Slabaugh
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.371.6578&rep=rep1&type=pdf