There are two modes that can be used:
- Parallel
- Sequential
The parallel mode is 2.5 times faster than the sequential mode when 7 parallel processes are used. The speed itself also depends on the parameters, but in the table below, we fix the parameters in order to compare the sequential and parallel modes.
| Example | Sequential | Parallel |
|---|---|---|
| example1 | 134 s | 55 s |
| example2 | 31 s | 12 s |
{kind=link}
{kind=link}
Parameters can be set at the end of disparity.py
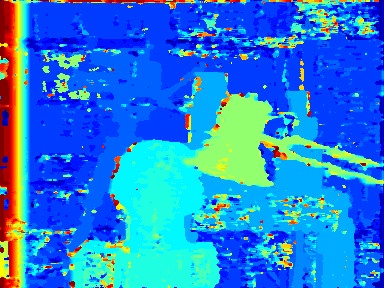
To make the resulting disparity map less heterogenous, we used the median filter also known as the filter that denoises the salt-and-pepper noise.
Here are a few examples following the execution of our disparity map function on sample images from data: