Time encoder implementation #22
Comments
|
The temporal encoding is managed by the AgentFormer/model/agentformer.py Lines 33 to 99 in e4fe8dd Hope this helps! |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
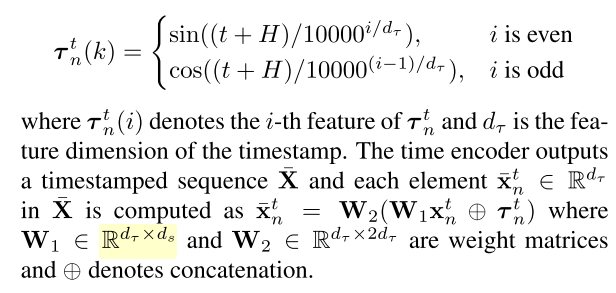
Hi, I really like your work in dealing with multi-agent trajectories prediction. I went through the paper and codes and popped up a quick question about the time encoder. As you mentioned in the paper, the time encoder that integrated the timestamp features differs from the original positional encoder. But I cannot find the time encoder codes in this repo. Please let me know if I missed anything. Much appreciated!
The text was updated successfully, but these errors were encountered: