Weather station - version 2 based on RPI2040
- Station is based on RPI2040 uC -> for dev purposes RPi Pico will be used
- Station is powered by 3.7V battery
- Station uses SIM800 or other GPRS module to send or receive data
- Station can use WiFi module to send or receive data
- Station is updated via micro-USB port
- Station supports OTA updates
- Set up CI to build project
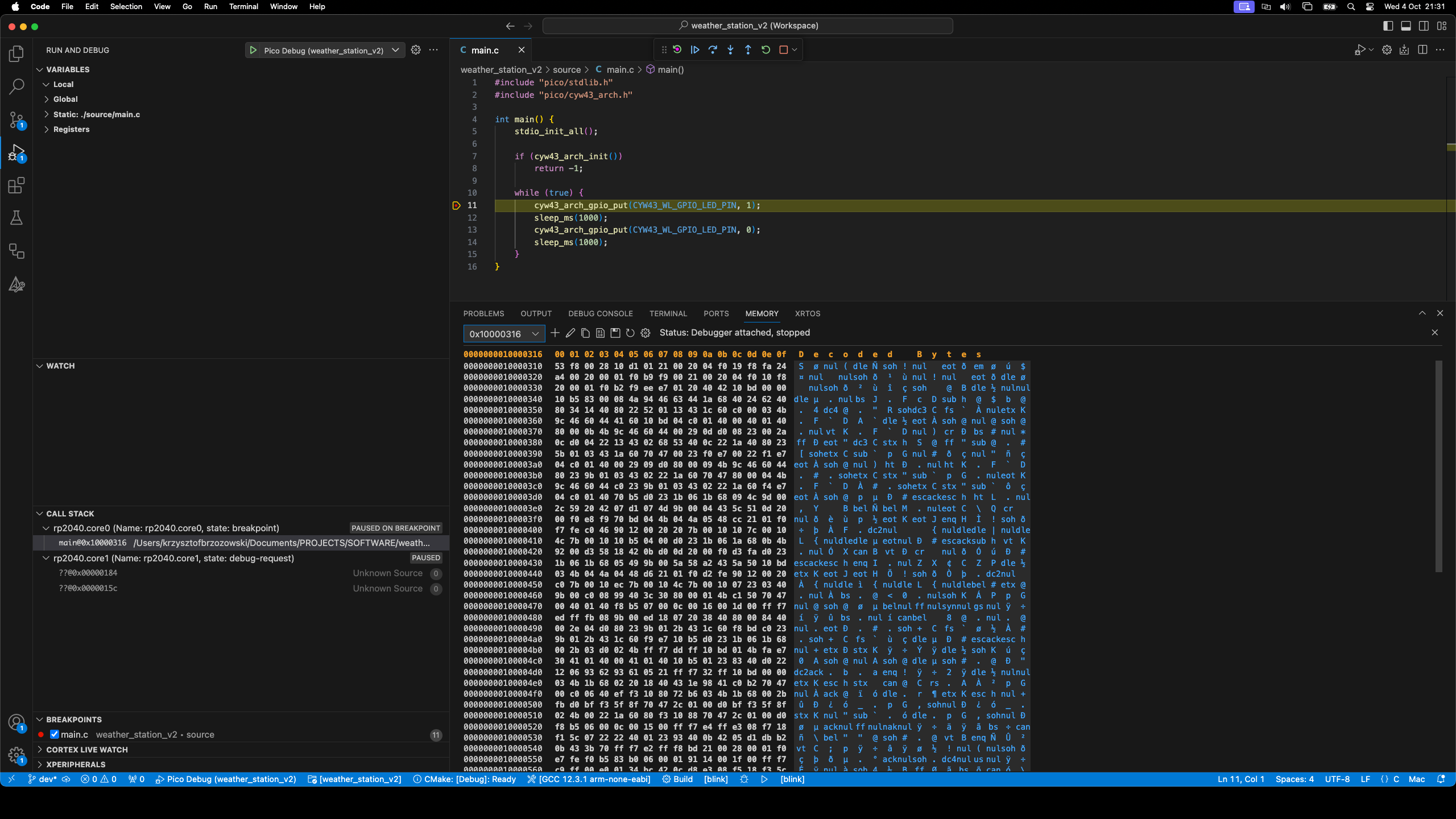
- Set up debugging locally
- Connect RPi Pico into prototype board
- Run UART
- Run sample code to scan WiFi networks
- Connect to WiFi and get iot server time printed via e.g. UART
- Build OpenOCD (If you using MacOS you can use below commands)
<!-- skip if have brew installed -->
$ /bin/bash -c "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/master/install.sh)"
<!-- Install tools to build OpenOCD -->
$ brew install libtool automake libusb wget pkg-config gcc texinfo
<!-- Clone and build OpenOCD -->
$ git clone https://github.com/raspberrypi/openocd.git --branch rp2040-v0.12.0 --recursive --depth=1
$ cd openocd
$ ./bootstrap
$ ./configure --disable-werror
$ make -j4
<!-- Install GDB -->
$ brew install gdb
<!-- Install minicom -->
$ brew install minicom
<!-- run minicom -->
minicom -b 115200 -o -D /dev/cu.usbmodem1423402- Set up .vscode folder with correct options and paths Configure launch.json with
"serverpath": "...",
"searchDir": ["..."],Example of launch.json:
{
"version": "0.2.0",
"configurations": [
{
"name": "Pico Debug",
"cwd": "${workspaceRoot}",
"executable": "${command:cmake.launchTargetPath}",
"request": "launch",
"type": "cortex-debug",
"servertype": "openocd",
// This may need to be "arm-none-eabi-gdb" for some previous builds
"gdbPath" : "arm-none-eabi-gdb",
"device": "RP2040",
"configFiles": [
"/Users/krzysztofbrzozowski/Tools/openocd/tcl/interface/cmsis-dap.cfg",
"/Users/krzysztofbrzozowski/Tools/openocd/tcl/target/rp2040.cfg"
],
"svdFile": "${env:PICO_SDK_PATH}/src/rp2040/hardware_regs/rp2040.svd",
"runToEntryPoint": "main",
// Work around for stopping at main on restart
"postRestartCommands": [
"break main",
"continue"
],
"showDevDebugOutput": true,
"serverpath": "/Users/krzysztofbrzozowski/Tools/openocd/src/openocd",
"searchDir": ["/Users/krzysztofbrzozowski/Tools/openocd/tcl"]
}
]
}Example of settings.json:
{
"cmake.environment": {
"PICO_SDK_PATH": "/Users/krzysztofbrzozowski/Documents/PROJECTS/SOFTWARE/rpi_pico.nosync/pico-sdk"
},
"cmake.statusbar.advanced": {
"debug": {
"visibility": "hidden"
},
"launch": {
"visibility": "hidden"
},
"build": {
"visibility": "default"
},
"buildTarget": {
"visibility": "hidden"
}
},
"cmake.buildBeforeRun": true,
"C_Cpp.default.configurationProvider": "ms-vscode.cmake-tools",
"cortex-debug.openocdPath": "/Users/krzysztofbrzozowski/Tools/openocd/src/openocd"
}